3D-2D:PnP
引言
ch7.
PnP(Perspective-n-Point)是求解3D到2D点对运动的方法.已知
个空间点
(前一帧的相机坐标系)以及他们的投影位置
(归一化平面坐标系)。
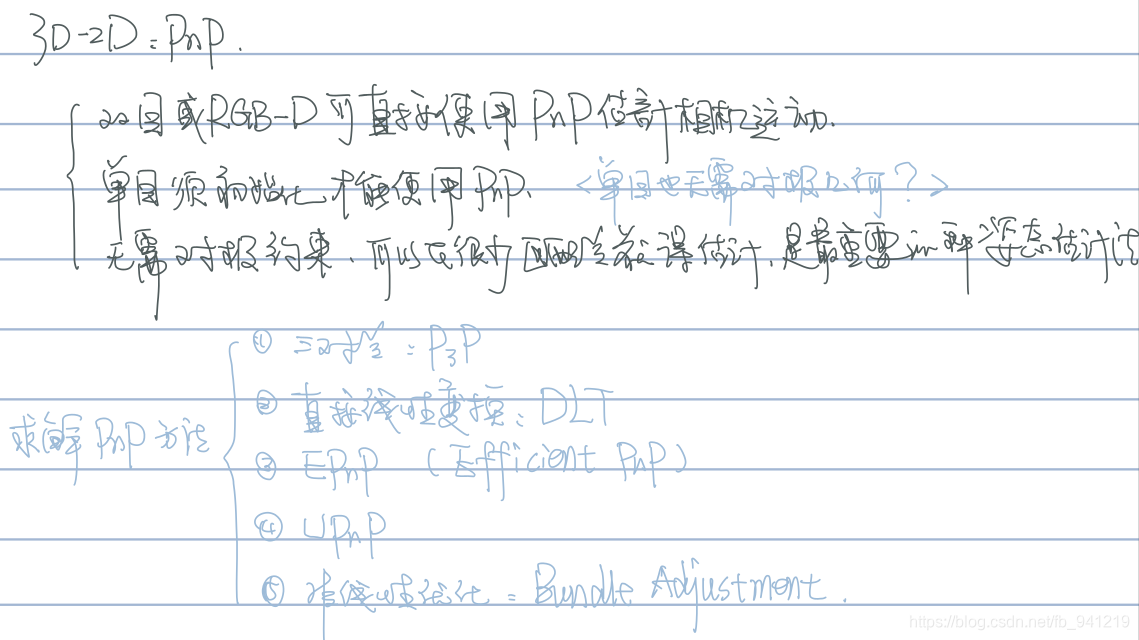
1.直接线性变换(DLT)
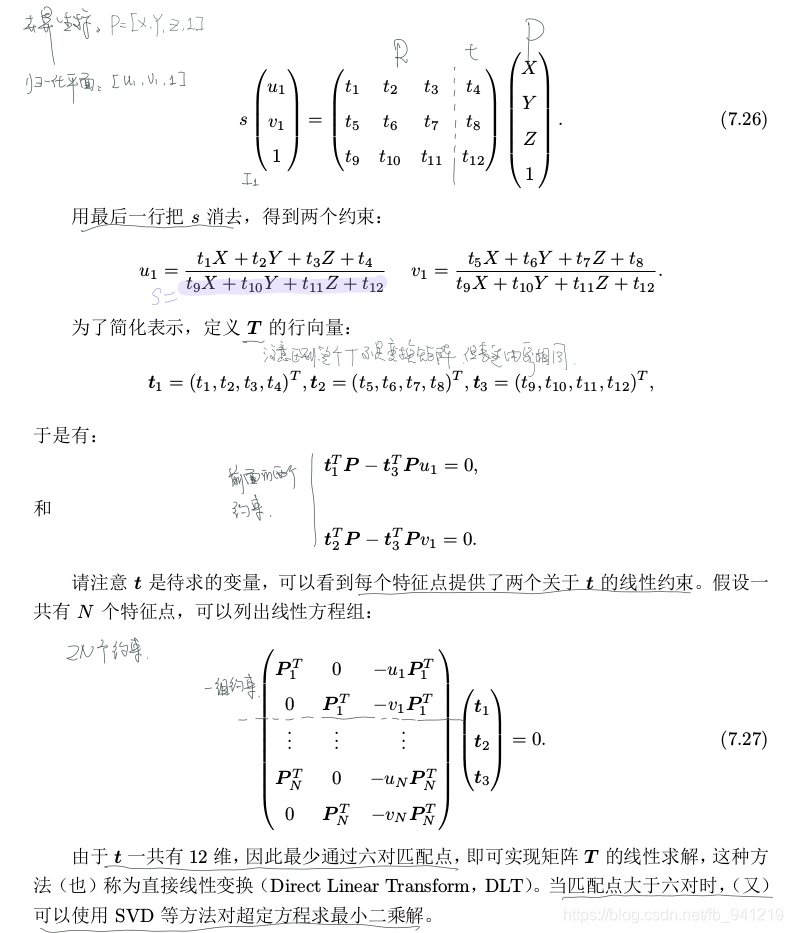
以图像理解,不然以坐标系转换来看公式容易理解错,而且推不通!在DLT求解中,直接将T看成了12个未知数,忽略了他们之间的联系。因为旋转矩阵
,用DLT求解出的矩阵不一定满足这个约束,它只是个一般矩阵。平移向量好办,它属于空间向量。对与旋转矩阵
,必须针对DLT估计
的左边
的矩阵块,寻找一个最好的旋转矩阵对它进行近似。这可以由
分解完成,相当于把结果从矩阵空间重新投影到
流形上,转换成旋转和平移两部分。
2.P3P
略