1、A Practical Visual Servo Control for an Unmanned Aerial Vehicle
无人机实用视觉伺服控制
https://ieeexplore.ieee.org/document/4481181
摘要:基于图像的视觉伺服控制被呈现用于能够进行静止或准静止飞行的无人驾驶飞行器(UAV),其中摄像机安装在车辆上。所考虑的目标包括位于平面中的一组有限的静止和不相交点。使用基于球形质心数据的视觉误差,以及从图像特征和嵌入的惯性测量单元提取的线速度和重力惯性方向的估计来解耦位置和方向动态的控制。所使用的视觉误差通过引入适合于误差测量的视觉灵敏度的非均匀增益项来补偿图像雅可比矩阵的不良调节。一个非线性控制器,确保所考虑系统的指数收敛,使用控制Lyapunov函数设计技术导出系统的完整动力学。由法国原子能委员会开发的四旋翼无人机的实验结果证明了所提出的控制策略的稳健性和性能。
在介绍之后,第二节介绍了四旋翼无人机的基本运动方程。第三节介绍了图像特征的建议选择。第IV节提供了平移运动的运动控制设计。第V节将控制扩展到系统的完整动态。第VI部分给出了在实验四旋翼飞行器上获得的实验结果(图1)。最后,第七节提供了一些结论性意见

2、SE(4)上四旋翼无人机的几何跟踪控制
https://ieeexplore.ieee.org/document/5717652
摘要:本文为四旋翼无人机(UAV)的跟踪控制提供了新的结果。无人机有四个输入自由度,即四个转子推力的大小,用于控制六个平移和旋转自由度,并实现四个输出的渐近跟踪,即车辆中心的三个位置变量质量和一个车身固定轴的方向。引入全局定义的四旋翼无人机刚体动力学模型作为分析的基础。在特殊欧几里得群SE(3)上开发了非线性跟踪控制器,并且显示出具有几乎全局的理想闭环特性。几个数值例子,包括一个例子,其中四旋翼飞行器从最初颠倒恢复。
结论
我们提出了一个四旋翼无人机的全局动力学模型,我们直接在特殊的欧几里得群上开发了一个几何跟踪控制器,它具有内在和无坐标,从而避免了欧拉角的奇异性和四元数在表示态度时的模糊性。当初始姿态误差小于90°时,它表现出指数稳定性,当初始姿态误差小于180°时,它几乎产生全局指数吸引力。这些通过数值例子说明。

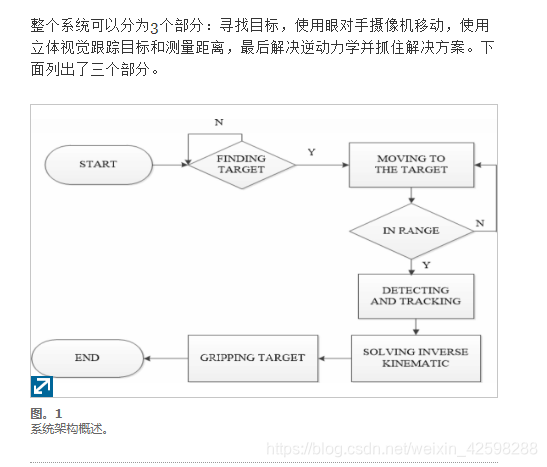
3、3D Vision for Mobile robot Manipulator on Detecting and Tracking Target
移动机器人机器人三维视觉检测与跟踪目标-2015
https://ieeexplore.ieee.org/document/7364605
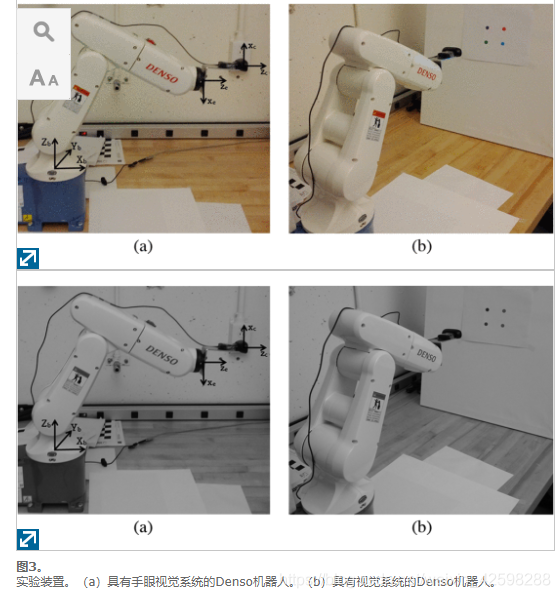
摘要:在这项研究中,移动机器人操纵的应用研究应用立体视觉系统,跟踪和抓住不同学科的对象,以产生具有执行复杂实际任务的能力的机器人系统。用于**基于姿势的视觉伺服和构造的立体摄像机生成对象到操纵器的3D地图。提供了移动机器人控制,立体视觉,变换函数和逆运动学的算法,**使研究更加全面。该研究成功地将计算机视觉技术集成到移动机器人机械手中,定义了两个摄像机的目标基础,并解决了4自由度弯头机械手的逆运动学功能。摄像系统成功跟踪测量距离; 对象位于操纵器的工作空间内,计算机计算逆运动方程,以找出手臂到达目标的最佳角度。实验结果表明了所提出的控制方法的能力。
本文提出了一种基于立体视觉的基于位置视觉伺服(PBVS)的移动机器人机械手方法。立体摄像机的输出用于检测和跟踪目标。还构建了基于视觉系统的三维坐标。在求解目标与机器人之间的关系后,计算机械手到达并抓住目标的逆运动学解。
应用使用阈值方法的颜色检测——连通 - 组件标记——距离测量——最小二乘法减小误差
3D姿态估计:对象检测,测量物相距离。
在这个实验中,目标随机放在机器人前面,移动机器人缓慢移动,使用立体摄像头检测物体并抓住它。将目标放在三个不同的位置,并记录末端执行器的轨迹。
在本文中,作者提出了控制机器人的开环方法,因此精度不高,在10次测试中,机械手只能抓6次,所以它精确到60%左右。手臂末端执行器的轨迹如图8所示。
4、基于增强命令的机械手增强图像视觉伺服-2014
Augmented Image-Based Visual Servoing of a Manipulator Using Acceleration Command
https://ieeexplore.ieee.org/document/6712119
摘要:本文提出了一种新的基于图像的视觉伺服(IBVS)控制器,名为增强型IBVS,用于6自由度机械手。该控制器的主要思想是它产生加速度作为控制命令。开发了比例微分控制器,为机器人提供控制命令。该控制器可以在图像空间中实现更平滑和更线性的特征轨迹,并降低特征离开视野的风险。开发的控制方法还增强了三维空间中的摄像机轨迹。利用Lyapunov方法和扰动系统理论,充分研究了该方法的稳定性。在6-DOF机器人系统上进行实验测试以验证所提出的控制器的有效性。
5、https://ieeexplore.ieee.org/document/7097745
具有执行器模糊死区约束和未建模动态的机械手自适应视觉跟踪控制-2015
摘要:本文重点研究了具有执行器模糊死区约束和未知动态的未校准图像视觉伺服机械手系统的自适应视觉跟踪控制问题。在没有系统的先验知识的情况下,采用模糊逻辑系统来近似未建模的非线性机械手动力学和外部扰动。与传统的模糊逻辑系统相比,通过使用递归Newton-Euler方法,可以显着减少模糊规则的总数。通过将模糊死区模型的模糊斜率k̅去模糊化为确定性值k̅,构造了一种新的模糊自适应控制器,消除了模糊死区约束的有害影响。提出Lyapunov函数用于具有未知动态和致动器模糊死区约束的视觉反馈控制问题的稳定性分析。实验结果用于测试所提出的控制器的视觉跟踪性能和闭环系统的有界性。
A.视觉系统描述和问题陈述
在本文中, 米 在机械手末端执行器上标记特征点,采用带透视投影的固定摄像头观察特征点的运动。图1显示了ETH IBVS机械手系统的结构。假设相机的固有参数和相机与机器人之间的均匀变换矩阵是未知的。此外,还考虑了未知的机械手动力学和系统的外部干扰。最后,应研究具有不确定模糊死区约束的执行器输入问题。如上面对未校准的IBVS操纵器系统的描述,目标如下所示。

装置由三菱工业机器人,CR1D-721控制器,定制PC,CCD摄像头和示教器组成。这款三菱工业六自由度机械手配备交流伺服电机,绝对编码器检测位置,六轴输入扭矩,RS-232C / USB接口。机器人的质量为37千克,而上臂和前臂的长度为245毫米和275毫米。机器人关节的最大合成速度为5500 mm / s。

6、Robust Pose Estimation from a Planar Target
平面目标的鲁棒姿态估计-2006
https://ieeexplore.ieee.org/document/1717461
摘要:理论上,校准相机的姿态可以从最少四个共面但非共线点唯一确定。在实践中,存在来自平面目标的相机姿态跟踪的许多应用,并且还存在许多最近实时执行该任务的姿势估计算法,但是所有这些算法都存在姿势模糊。本文研究了透视摄像机观察到的平面目标的姿态模糊性。我们表明,即使对于具有广角镜头和近距离目标的情况,也存在姿势模糊 - 相应误差函数的两个不同的局部最小值。我们对两个最小值进行了全面的解释,并得出了一个位于第二个最小值的解析解。基于这个解决方案,我们开发了一种新的算法,用于从平面目标进行独特且稳健的姿态估计。在实验评估中,该算法优于四种最先进的姿态估计算法
7、使用IR信标的低成本基于视觉的6-DOF MAV定位-2013
Low-Cost Vision-Based 6-DOF MAV Localization Using IR Beacons
https://ieeexplore.ieee.org/document/6584225
摘要:微型飞行器(MAV)的自主运行是一个具有挑战性的研究领域,近年来受到了很多研究兴趣。特别是,MAV的精确定位是一个问题,在需要高精度的任务期间最重要,例如室内飞行和着陆。许多现有解决方案要么不准确,要么重,要么昂贵。我们提出了一种基于视觉的低成本解决方案来解决MAV的本地化问题。内置视觉处理的车载红外跟踪传感器用于检测红外标记,并且实现基于点的姿态估计算法以高速率获得6 DOF定位。将系统性能与惯性测量单元(IMU)和外部立体视觉测量结果进行比较,作为基础事实。我们证明该系统以低成本和重量以计算上廉价的方式产生准确的6 DOF估计,并且可立即用于控制实现。因此,我们的解决方案为MAV提供了可行的本地化解决方案
8、周围髋臼截骨术的增强标记跟踪-2017
Augmented Marker Tracking for Peri-acetabular Osteotomy Surgery
https://ieeexplore.ieee.org/document/8036979
摘要:我们开发并验证了一种小型,易于使用且经济有效的基于增强标记的混合导航系统,用于髋臼周围截骨术(PAO)。混合系统包括直接放置在患者骨盆上的跟踪单元,带有集成惯性测量单元('MU)的增强标记,其连接到患者的髋臼碎片和主计算机。跟踪单元将标记的实况视频流发送到主计算机,在主计算机中估计标记的姿势。具有’MU的增强标记将其姿势估计发送到主计算机,其中我们应用传感器融合来计算最终标记姿势估计。然后,主计算机在髋臼周围截骨术中跟踪髋臼碎片的方向。使用先前开发的注册设备完成解剖注册。添加基于卡尔曼滤波器的传感器融合以完成系统。进行了塑料骨研究,以便在基于光学跟踪的导航系统和我们提出的系统之间进行验证。倾斜和前倾的平均绝对差分别为1.63度和1.55度。结果表明,我们的系统能够准确测量髋臼碎片的方向。