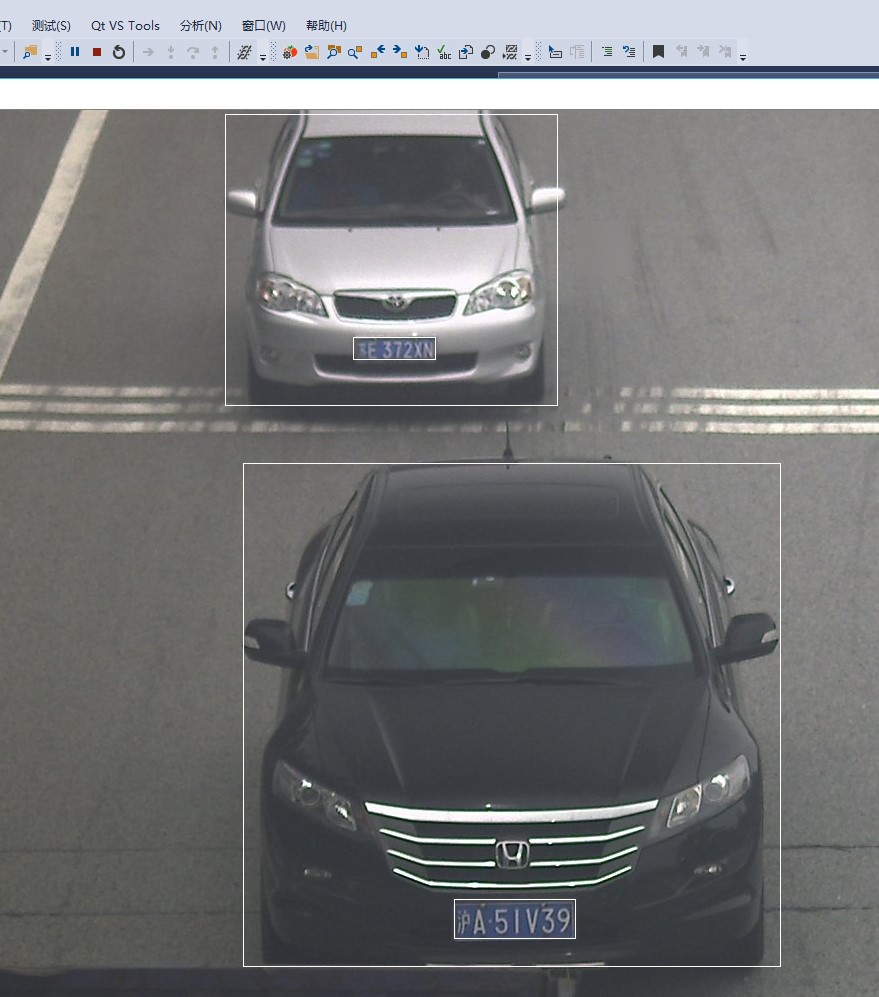
这样一张图,可以识别多车辆和车牌,问题是如何区分并且配对。
 0
0
 1
1
 7
7
 8
8
是否是车牌可以通过图片的大小进行判断。而配对是前后顺序的。

// --------------------------- 8. 处理结果-------------------------------------------------------
const float *detections = infer_request.GetBlob(firstOutputName)->buffer().as<float *>();
int i_car = 0;
int i_plate = 0;
for (int i = 0; i < 200; i++)
{
float confidence = detections[i * objectSize + 2];
float x_min = static_cast<int>(detections[i * objectSize + 3] * src.cols);
float y_min = static_cast<int>(detections[i * objectSize + 4] * src.rows);
float x_max = static_cast<int>(detections[i * objectSize + 5] * src.cols);
float y_max = static_cast<int>(detections[i * objectSize + 6] * src.rows);
Rect rect = cv::Rect(cv::Point(x_min, y_min), cv::Point(x_max, y_max));
if (confidence > 0.5)
{
if (rect.width > 150)//车辆
{
char cbuf[255];
sprintf_s(cbuf, "E:/OpenVINO_modelZoo/car_%d.jpg", i_car);
Mat roi = src(rect);
imwrite(cbuf, roi);
cv::rectangle(src, rect, cv::Scalar(255, 255, 255));
i_car++;
}
else//车牌
{
char cbuf[255];
sprintf_s(cbuf, "E:/OpenVINO_modelZoo/plant_%d.jpg", i_plate);
Mat roi = src(rect);
imwrite(cbuf, roi);
cv::rectangle(src, rect, cv::Scalar(0, 0, 255));
i_plate++;
}
}
}
这种处理的方法,后面应该还是要用的
二、函数化封装和合并;
以下是原始代码
#
include
<algorithm
>
#
include
<fstream
>
#
include
<iomanip
>
#
include
<vector
>
#
include
<string
>
#
include
<chrono
>
#
include
<memory
>
#
include
<utility
>
#
include
<format_reader_ptr.h
>
#
include
<inference_engine.hpp
>
#
include
<ext_list.hpp
>
#
include
<samples
/slog.hpp
>
#
include
<samples
/ocv_common.hpp
>
#
include
"segmentation_demo.h"
using
namespace InferenceEngine;
using
namespace std;
using
namespace cv;
//从图片中获得车和车牌(这里没有输出模型的定位结果,如果需要可以适当修改)
vector
< pair
<Mat, Mat
>
> GetCarAndPlate(Mat src)
{
vector
<pair
<Mat, Mat
>> resultVector;
// 模型准备
InferencePlugin plugin(PluginDispatcher().getSuitablePlugin(TargetDevice
:
:eCPU));
plugin.AddExtension(std
:
:make_shared
<Extensions
:
:Cpu
:
:CpuExtensions
>());
//Extension,useful
//读取模型(xml和bin
CNNNetReader networkReader;
networkReader.ReadNetwork(
"E:/OpenVINO_modelZoo/vehicle-license-plate-detection-barrier-0106.xml");
networkReader.ReadWeights(
"E:/OpenVINO_modelZoo/vehicle-license-plate-detection-barrier-0106.bin");
CNNNetwork network
= networkReader.getNetwork();
network.setBatchSize(
1);
// 输入输出准备
InputsDataMap inputInfo(network.getInputsInfo());
//获得输入信息
if (inputInfo.size()
!=
1)
throw std
:
:logic_error(
"错误,该模型应该为单输入");
string inputName
= inputInfo.begin()
-
>first;
OutputsDataMap outputInfo(network.getOutputsInfo());
//获得输出信息
DataPtr
& _output
= outputInfo.begin()
-
>second;
const SizeVector outputDims
= _output
-
>getTensorDesc().getDims();
string firstOutputName
= outputInfo.begin()
-
>first;
int maxProposalCount
= outputDims[
2];
int objectSize
= outputDims[
3];
if (objectSize
!=
7) {
throw std
:
:logic_error(
"Output should have 7 as a last dimension");
}
if (outputDims.size()
!=
4) {
throw std
:
:logic_error(
"Incorrect output dimensions for SSD");
}
_output
-
>setPrecision(Precision
:
:FP32);
_output
-
>setLayout(Layout
:
:NCHW);
// 模型读取和推断
ExecutableNetwork executableNetwork
= plugin.LoadNetwork(network, {});
InferRequest infer_request
= executableNetwork.CreateInferRequest();
Blob
:
:Ptr lrInputBlob
= infer_request.GetBlob(inputName);
//data这个名字是我看出来的,实际上这里可以更统一一些
matU8ToBlob
<float_t
>(src, lrInputBlob,
0);
//重要的转换函数,第3个参数是batchSize,应该是自己+1的
infer_request.Infer();
// --------------------------- 8. 处理结果-------------------------------------------------------
const
float
*detections
= infer_request.GetBlob(firstOutputName)
-
>buffer().as
<
float
*
>();
int i_car
=
0;
int i_plate
=
0;
for (
int i
=
0; i
<
200; i
++)
{
float confidence
= detections[i
* objectSize
+
2];
float x_min
=
static_cast
<
int
>(detections[i
* objectSize
+
3]
* src.cols);
float y_min
=
static_cast
<
int
>(detections[i
* objectSize
+
4]
* src.rows);
float x_max
=
static_cast
<
int
>(detections[i
* objectSize
+
5]
* src.cols);
float y_max
=
static_cast
<
int
>(detections[i
* objectSize
+
6]
* src.rows);
Rect rect
= cv
:
:Rect(cv
:
:Point(x_min, y_min), cv
:
:Point(x_max, y_max));
if (confidence
>
0.
5)
{
if (rect.width
>
150)
//车辆
{
Mat roi
= src(rect);
pair
<Mat, Mat
> aPair;
aPair.first
= roi.clone();
resultVector.push_back(aPair);
i_car
++;
}
else
//车牌
{
Mat roi
= src(rect);
resultVector[i_plate].second
= roi.clone();
i_plate
++;
}
}
}
return resultVector;
}
//从车的图片中识别车型
pair
<string,string
> GetCarAttributes(Mat src)
{
pair
<string, string
> resultPair;
// --------------------------- 1.为IE准备插件-------------------------------------
InferencePlugin plugin(PluginDispatcher().getSuitablePlugin(TargetDevice
:
:eCPU));
printPluginVersion(plugin, std
:
:cout);
//正确回显表示成功
plugin.AddExtension(std
:
:make_shared
<Extensions
:
:Cpu
:
:CpuExtensions
>());
//Extension,useful
// --------------------------- 2.读取IR模型(xml和bin)---------------------------------
CNNNetReader networkReader;
networkReader.ReadNetwork(
"E:/OpenVINO_modelZoo/vehicle-attributes-recognition-barrier-0039.xml");
networkReader.ReadWeights(
"E:/OpenVINO_modelZoo/vehicle-attributes-recognition-barrier-0039.bin");
CNNNetwork network
= networkReader.getNetwork();
// --------------------------- 3. 准备输入输出的------------------------------------------
InputsDataMap inputInfo(network.getInputsInfo());
//获得输入信息
BlobMap inputBlobs;
//保持所有输入的blob数据
if (inputInfo.size()
!=
1)
throw std
:
:logic_error(
"错误,该模型应该为单输入");
auto lrInputInfoItem
=
*inputInfo.begin();
//开始读入
int w
=
static_cast
<
int
>(lrInputInfoItem.second
-
>getTensorDesc().getDims()[
3]);
//这种写法也是可以的,它的first就是data
int h
=
static_cast
<
int
>(lrInputInfoItem.second
-
>getTensorDesc().getDims()[
2]);
network.setBatchSize(
1);
//只有1副图片,故BatchSize = 1
// --------------------------- 4. 读取模型 ------------------------------------------(后面这些操作应该可以合并了)
ExecutableNetwork executableNetwork
= plugin.LoadNetwork(network, {});
// --------------------------- 5. 创建推断 -------------------------------------------------
InferRequest infer_request
= executableNetwork.CreateInferRequest();
// --------------------------- 6. 将数据塞入模型 -------------------------------------------------
Blob
:
:Ptr lrInputBlob
= infer_request.GetBlob(
"input");
//data这个名字是我看出来的,实际上这里可以更统一一些
matU8ToBlob
<float_t
>(src, lrInputBlob,
0);
//重要的转换函数,第3个参数是batchSize,应该是自己+1的
// --------------------------- 7. 推断结果 -------------------------------------------------
infer_request.Infer();
//多张图片多次推断
// --------------------------- 8. 处理结果-------------------------------------------------------
// 7 possible colors for each vehicle and we should select the one with the maximum probability
auto colorsValues
= infer_request.GetBlob(
"color")
-
>buffer().as
<
float
*
>();
// 4 possible types for each vehicle and we should select the one with the maximum probability
auto typesValues
= infer_request.GetBlob(
"type")
-
>buffer().as
<
float
*
>();
const
auto color_id
= std
:
:max_element(colorsValues, colorsValues
+
7)
- colorsValues;
const
auto type_id
= std
:
:max_element(typesValues, typesValues
+
4)
- typesValues;
static
const std
:
:string colors[]
= {
"white",
"gray",
"yellow",
"red",
"green",
"blue",
"black"
};
static
const std
:
:string types[]
= {
"car",
"bus",
"truck",
"van"
};
resultPair.first
= colors[color_id];
resultPair.second
= types[type_id];
return resultPair;
}
//识别车牌
string GetPlateNumber(Mat src)
{
// --------------------------- 1.为IE准备插件-------------------------------------
InferencePlugin plugin(PluginDispatcher().getSuitablePlugin(TargetDevice
:
:eCPU));
plugin.AddExtension(std
:
:make_shared
<Extensions
:
:Cpu
:
:CpuExtensions
>());
//Extension,useful
// --------------------------- 2.读取IR模型(xml和bin)---------------------------------
CNNNetReader networkReader;
networkReader.ReadNetwork(
"E:/OpenVINO_modelZoo/license-plate-recognition-barrier-0001.xml");
networkReader.ReadWeights(
"E:/OpenVINO_modelZoo/license-plate-recognition-barrier-0001.bin");
CNNNetwork network
= networkReader.getNetwork();
network.setBatchSize(
1);
//只有1副图片,故BatchSize = 1
// --------------------------- 3. 准备输入输出的------------------------------------------
InputsDataMap inputInfo(network.getInputsInfo());
//获得输入信息
BlobMap inputBlobs;
//保持所有输入的blob数据
string inputSeqName;
if (inputInfo.size()
==
2) {
auto sequenceInput
= (
++inputInfo.begin());
inputSeqName
= sequenceInput
-
>first;
}
else
if (inputInfo.size()
==
1) {
inputSeqName
=
"";
}
else {
throw std
:
:logic_error(
"LPR should have 1 or 2 inputs");
}
InputInfo
:
:Ptr
& inputInfoFirst
= inputInfo.begin()
-
>second;
inputInfoFirst
-
>setInputPrecision(Precision
:
:U8);
string inputName
= inputInfo.begin()
-
>first;
//准备输出数据
OutputsDataMap outputInfo(network.getOutputsInfo());
//获得输出信息
if (outputInfo.size()
!=
1) {
throw std
:
:logic_error(
"LPR should have 1 output");
}
string firstOutputName
= outputInfo.begin()
-
>first;
DataPtr
& _output
= outputInfo.begin()
-
>second;
const SizeVector outputDims
= _output
-
>getTensorDesc().getDims();
// --------------------------- 4. 读取模型 ------------------------------------------(后面这些操作应该可以合并了)
ExecutableNetwork executableNetwork
= plugin.LoadNetwork(network, {});
// --------------------------- 5. 创建推断 -------------------------------------------------
InferRequest infer_request
= executableNetwork.CreateInferRequest();
// --------------------------- 6. 将数据塞入模型 -------------------------------------------------
Blob
:
:Ptr lrInputBlob
= infer_request.GetBlob(inputName);
//data这个名字是我看出来的,实际上这里可以更统一一些
matU8ToBlob
<uint8_t
>(src, lrInputBlob,
0);
//重要的转换函数,第3个参数是batchSize,应该是自己+1的
// --------------------------- 7. 推断结果 -------------------------------------------------
infer_request.Infer();
//多张图片多次推断
// --------------------------- 8. 处理结果-------------------------------------------------------
static std
:
:vector
<std
:
:string
> items
= {
"0",
"1",
"2",
"3",
"4",
"5",
"6",
"7",
"8",
"9",
"<Anhui>",
"<Beijing>",
"<Chongqing>",
"<Fujian>",
"<Gansu>",
"<Guangdong>",
"<Guangxi>",
"<Guizhou>",
"<Hainan>",
"<Hebei>",
"<Heilongjiang>",
"<Henan>",
"<HongKong>",
"<Hubei>",
"<Hunan>",
"<InnerMongolia>",
"<Jiangsu>",
"<Jiangxi>",
"<Jilin>",
"<Liaoning>",
"<Macau>",
"<Ningxia>",
"<Qinghai>",
"<Shaanxi>",
"<Shandong>",
"<Shanghai>",
"<Shanxi>",
"<Sichuan>",
"<Tianjin>",
"<Tibet>",
"<Xinjiang>",
"<Yunnan>",
"<Zhejiang>",
"<police>",
"A",
"B",
"C",
"D",
"E",
"F",
"G",
"H",
"I",
"J",
"K",
"L",
"M",
"N",
"O",
"P",
"Q",
"R",
"S",
"T",
"U",
"V",
"W",
"X",
"Y",
"Z"
};
const
auto data
= infer_request.GetBlob(firstOutputName)
-
>buffer().as
<
float
*
>();
std
:
:string result;
for (size_t i
=
0; i
<
88; i
++) {
if (data[i]
==
-
1)
break;
result
+= items[
static_cast
<size_t
>(data[i])];
}
return result;
}
void main()
{
string imageNames
=
"E:/OpenVINO_modelZoo/沪A51V39.jpg";
Mat src
= imread(imageNames);
if (src.empty())
return;
vector
<pair
<Mat, Mat
>> CarAndPlateVector
= GetCarAndPlate(src);
for (
int i
=
0;i
<CarAndPlateVector.size();i
++)
{
pair
<Mat, Mat
> aPair
= CarAndPlateVector[i];
pair
<string, string
> ColorAndType
= GetCarAttributes(aPair.first);
string PlateNumber
= GetPlateNumber(aPair.second);
cout
<< ColorAndType.first
<<
" "
<<ColorAndType.second
<<
" "
<< PlateNumber
<< endl;
}
cv
:
:waitKey();
}
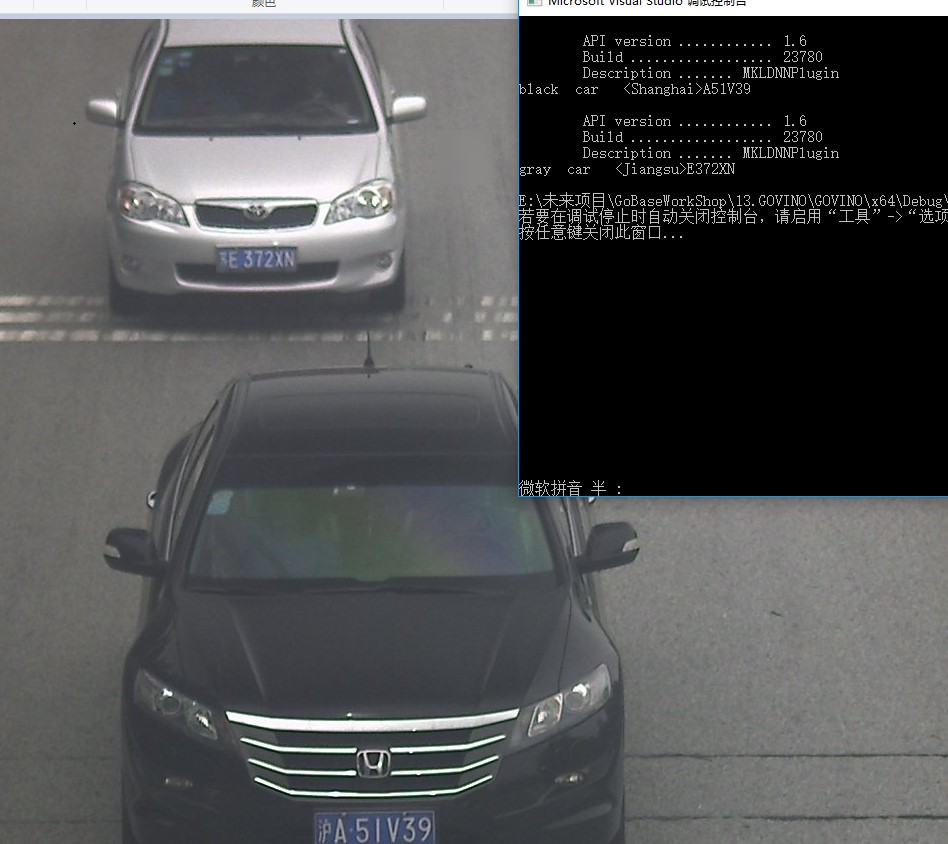
能够合并到这种程度是很有价值的,下一步可以思考找到更多的数据集进行训练,并且将这个结果进行转换。
从结果上来看,已经实现了级联问题,从这个层面是没有问题的;只有在具体的需求面前才可能看出问题。
我需要拓展一下车牌识别的真实需求,也许这个会成为我真正DL4CV的开始。
三、异步机制探索;
一直以来,我都为视频处理的速度问题所困扰,在“视频流”的处理过程中,必须首先获得一帧的数据,然后才能够处理这一
帧的数据,并且得到增强的结果——那么最后处理的速度必然同时受到视频采集和图像处理的限制。
这可能类似于CPU中流的处理,而且据我所知,这方面的研究不仅开始很久,而且效果显著,但是苦于一直没有一个可以参考的实现。现在OpenVINO中对于视频的处理,应该说是解决燃眉之急。
OpenVINO中相关函数
使用
StartAsync和
Wait来实现异步操作
(Do inference by calling the InferenceEngine::InferRequest::StartAsync and InferenceEngine::InferRequest::Wait methods for asynchronous request):
infer_request
-
>
StartAsync();
infer_request.Wait(IInferRequest
:
:
WaitMode
:
:
RESULT_READY);
或者采用
Infer 来实现同步操作(
or by calling the InferenceEngine::InferRequest::Infer method for synchronous request):
sync_infer_request
-
>
Infer();
在同步模式下推断函数Infer会一直阻塞,直到执行结束;在异步模式下推断调用函数StartAsync会立即返回,通过检查。
对于视频分析、视频中对象检测,OpenVINO官方建议通过异步方式可以实现更快的帧率处理.
异步虽然好,但是如果仅是这样改写

则价值不大,和同步没有区分。必须建立相应的机制:
在例子中,是这样建立的:
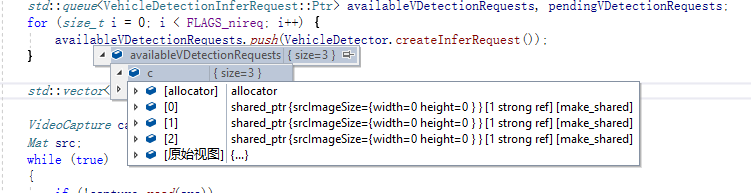
首先是创建:
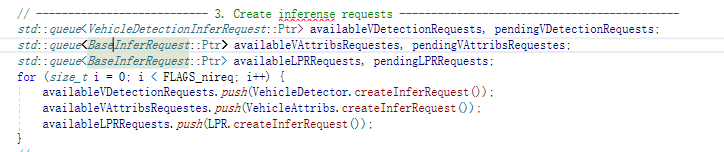
每一个检测,都包含available和pending两个部分,在创建的初期,根据FLAGS_nireq这个参数,来设定开几个available(可以理解开几个线程)
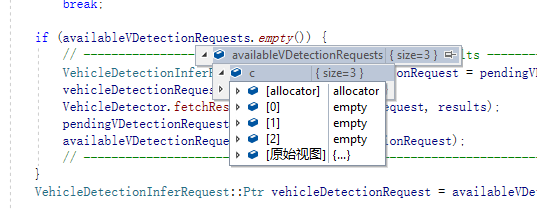
在每一个推断的开始,首先判断available是否还有,如果所有的
available都已经被使用,那么就必须要开始运算
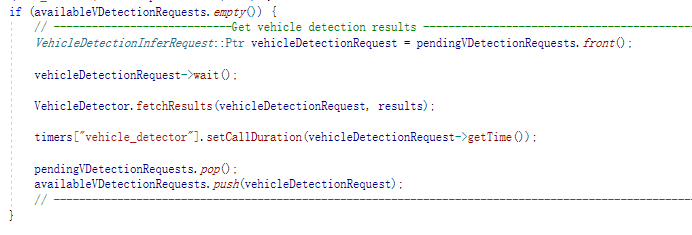
其中的

肯定就是在这个地方等待结果的;
如果avaiable还有,直接将推断送到下一个avaiable中去:
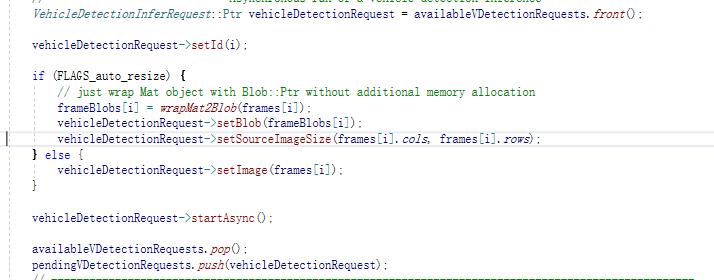
并且立刻开始推断。这样的话,就可以实现多个pending都在推断的状况。
在
FLAGS_nireq被设置为1的时候
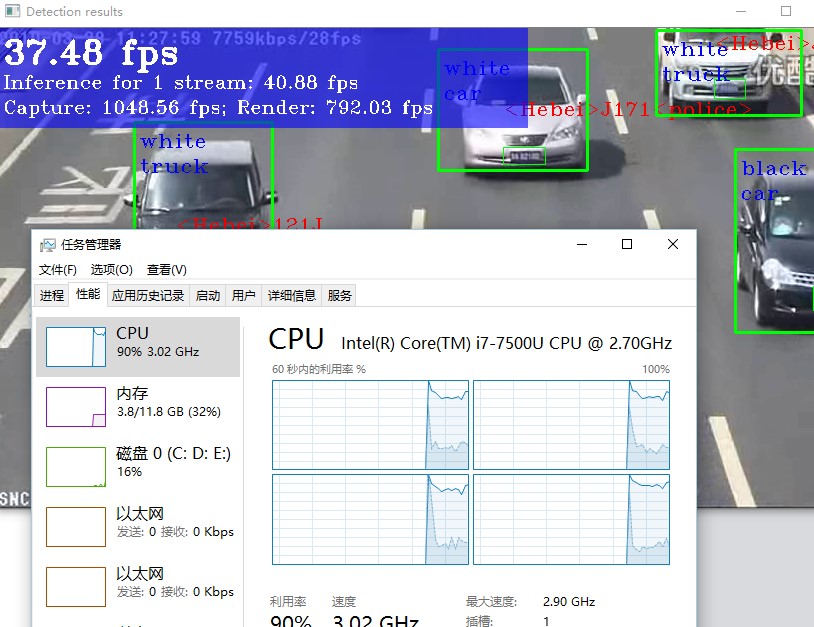
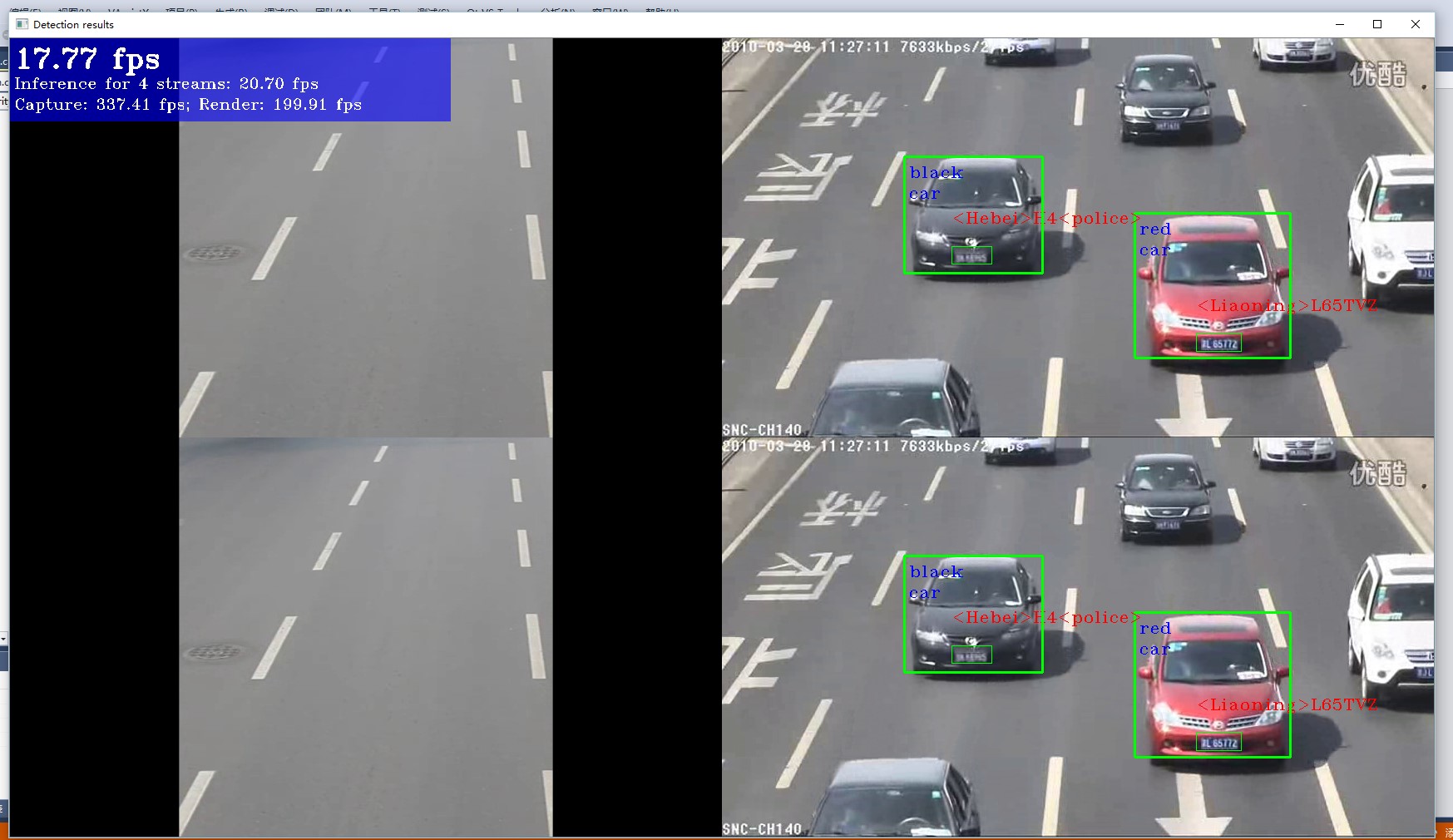
设置为3的时候
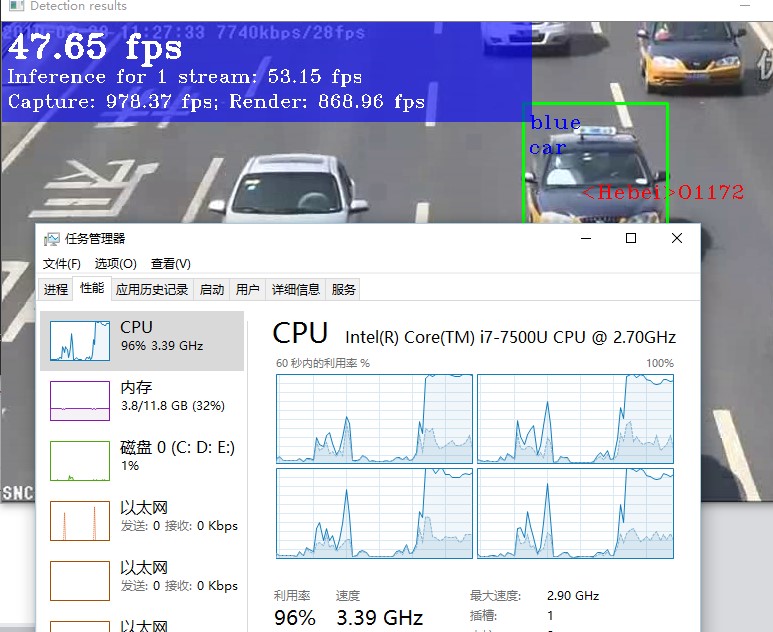
有所提高,但是不明显。
做一个4宫格
-nireq 3 -i E:/未来项目/炼数成金/(录制中)端到端/L9/道路监控数据集/1.avi E:/未来项目/炼数成金/(录制中)端到端/L9/道路监控数据集/2.avi E:/未来项目/炼数成金/(录制中)端到端/L9/道路监控数据集/1.avi E:/未来项目/炼数成金/(录制中)端到端/L9/道路监控数据集/2.avi -m E:/OpenVINO_modelZoo/vehicle-license-plate-detection-barrier-0106.xml -m_va E:/OpenVINO_modelZoo/vehicle-attributes-recognition-barrier-0039.xml -m_lpr E:/OpenVINO_modelZoo/license-plate-recognition-barrier-0001.xml
但是为了进一步研究问题,需要具体做例子来实验。
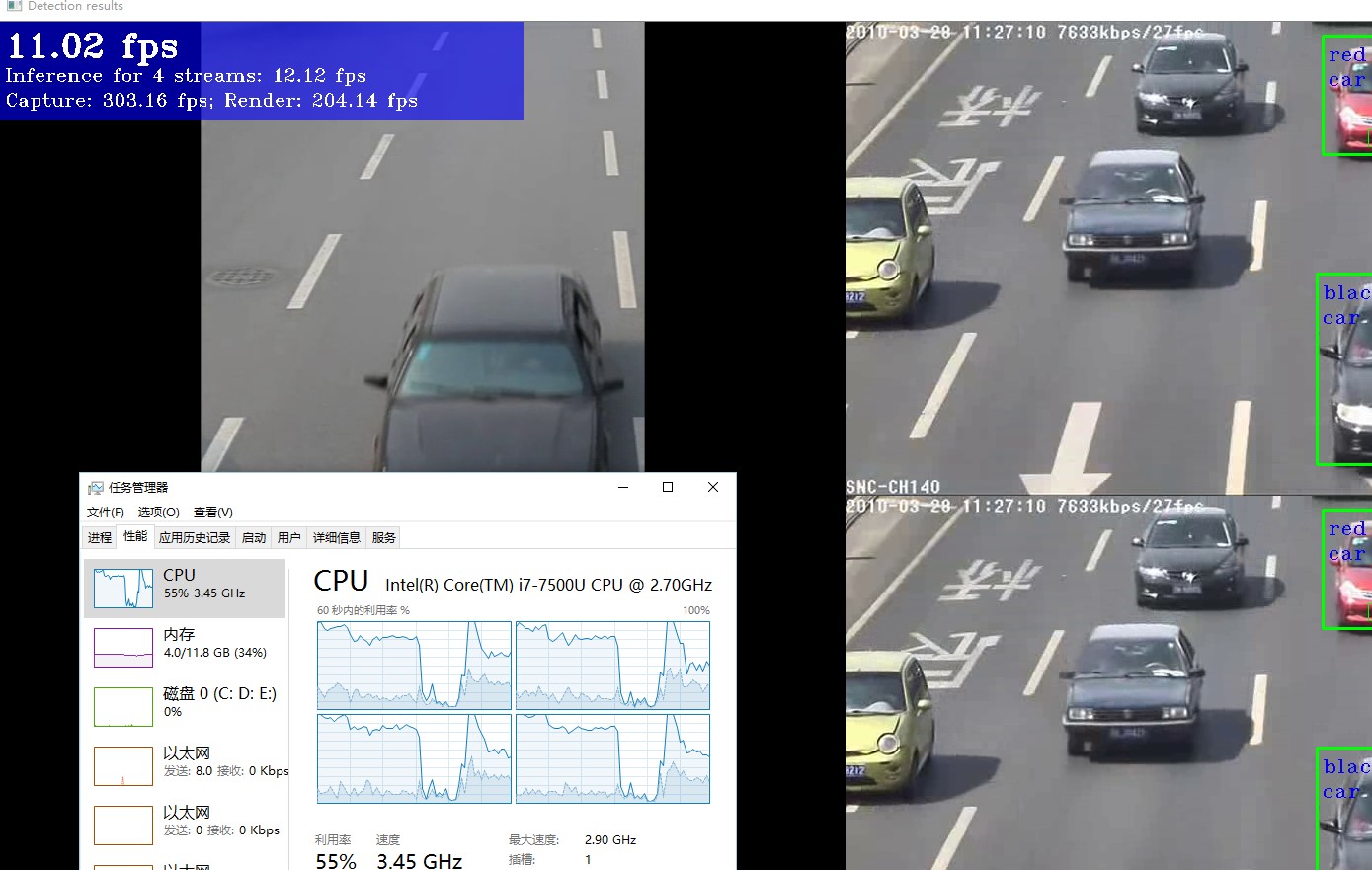
好吧,还是有所差异的。
四、类的封装其价值
最终该机制的速度不会快于单个推断速度,我们至少可以将整个操作分为”数据准备“”数据推断“和”数据显示“3个部分。
我们需要的是打开VideoCapture的相关代码
VideoCapture capture(
"E:/未来项目/炼数成金/(录制中)端到端/L9/道路监控数据集/2.avi");
Mat src;
while (
true)
{
if (
!capture.read(src))
break;
……
然后代码必须经过函数化(过程化无法被集成)和结构化(初始化的东西必须被独立出来,甚至可能会导致错误),参考现有例子是最方便的方式。然后对于生成的结果,我们需要做较为精确的测量。
其中有一个非常重要的“保护机制
”
,一定要注意对这个“机制”的理解,否则很容易出现下图问题
相比较之下,
正确调用产生的结果
其来源
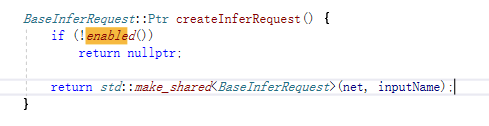
也就是在我们调用createInferRequest的时候,会首先判断当前detection的enabled,如果这个enabled为false,则直接退出为空。
而这个定义是被写死的
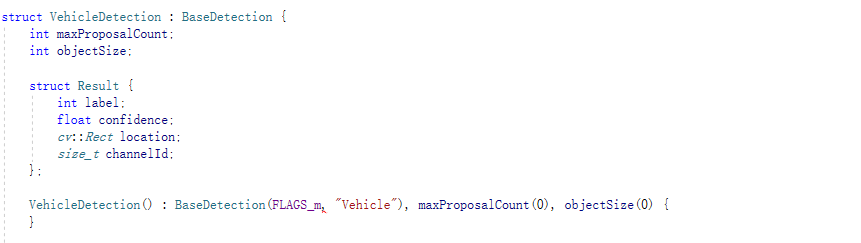
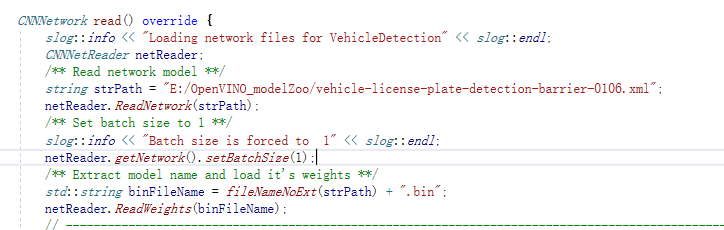
它在当前Detection(比如VehicleDetection)被创建的时候产生。由于原代码中FLAGS_m是作为参数输入的,则会定义;但是我们将代码独立出来,则这个地方是没有定义的,那么久比需将其规避掉。包括,将这个FLAGS_m直接写入

和将模型调用的参数直接写入
现在回顾这里的异步机制,它之所以能够提高速度,本质上还是较好的架构,我们通过画图来说明。
我们将整个处理的时间分为3个部分
 是数据采集和输入的时间,我们称之为C;
是数据采集和输入的时间,我们称之为C;
 是数据处理的时间(也是最消耗时间的地方),我们称之为P;
是数据处理的时间(也是最消耗时间的地方),我们称之为P;
 是数据显示的时间(这个基本可以做到旁路),我们称之为S。
是数据显示的时间(这个基本可以做到旁路),我们称之为S。
其中红、黄、蓝分别代表第1、2、3帧
原机制为
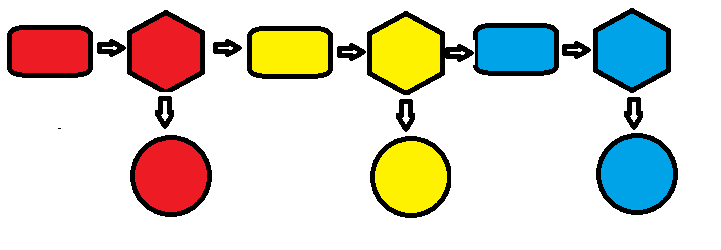
时间为C1+P1+C2+P2+C3+P3
使用机制进行了乱序
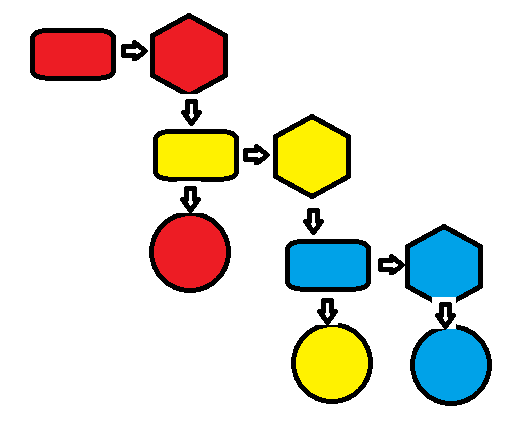
消耗时间不会大于(一般认为P>>C),C1+P1+P2+P3。能够将部分时间进行重叠,从而达到提高速度目的。
小结:
1、OpenVINO的推断操作比较快(最终该机制的速度不会快于单个推断速度,它只是将数据准备和数据显示进行重叠);
2、它的原子操作提供了这种“线程独立安全”的运算;
3、只有在满足"
原子操作线程独立“的基础上,才能够去做这样的操作。这种方法,将来要积极运用。