五个步骤:
1. 图片读取
2. 求取图像的梯度场
可以通过差分的方式求取图像的梯度场,包括source图像和destination图像。
3. 求解融合图像的散度
计算融合后图像每个像素的散度值。
4. 泊松重建
根据已知的图像散度和边界条件,建立泊松方程,并求解。
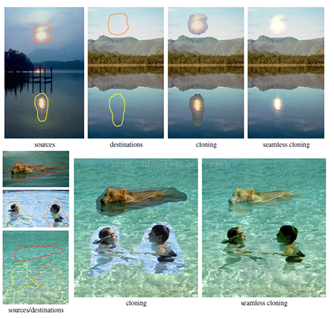
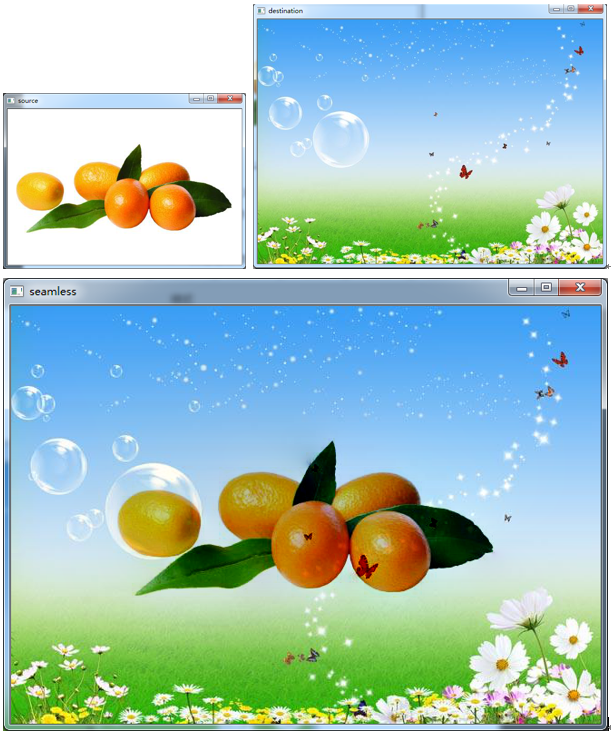
5. 图像融合效果
源代码:
#include<opencv2\opencv.hpp>
using namespace cv;
int main()
{
// 1. 图片读取
Mat src = imread("123.jpg");
Mat dst = imread("timg.jpg");
if (src.empty() || dst.empty())
{
return 0;
}
Mat src_mask = 255 * Mat::ones(src.rows, src.cols, src.depth());
Point center(dst.cols / 2, dst.rows / 2);
Mat normal_clone;
Mat mixed_clone;
seamlessClone(src, dst, src_mask, center, normal_clone, NORMAL_CLONE);
seamlessClone(src, dst, src_mask, center, mixed_clone, MIXED_CLONE);
imshow("source", src);
imshow("destination", dst);
imshow("seamless", mixed_clone);
waitKey(0);
return 1;
}程序使用说明:
1. OPENCV版本:opencv3.0版本
2. VS版本:vs2013版本(Debug Win32平台)
3. 图片位置:../../demo/xxx.jpg
4. 环境变量Path:
F:\opencv3.0\opencv\build\x86\vc12\lib;
F:\opencv3.0\opencv\build\x86\vc12\lib;
5. 包含目录:
..\opencv\build\include
..\opencv\build\include\opencv
..\opencv\build\include\opencv2
6. 库目录:
..\opencv\build\x86\vc12\bin
..\opencv\build\x86\vc12\lib
7. 附加依赖项:
opencv_ts300.lib
opencv_world300.lib
效果图: