一.简介
KUKA.EthernetKRL软件包提供了通过网络和机器人控制器进行双向通信的功能。使用TCP/IP协议,通过服务器端和客户端方式进行通信,网络传输通过xml进行配置,传输内容也是xml格式。通信延迟在2ms以下。因此可以做一些实时性比较高的任务,比如在线分拣等。
二.准备工作
软件包安装
确保KUKA控制器安装了EthernetKRL软件包。如果没有安装,查看机器人D盘的kuka_option文件夹下是否有,如果有,点击setup安装,如果没有,需要联系机器人厂家购买该软件包。
网线连接与IP地址配置
使用网线把KUKA控制器的x66或者x67接口和pc的网口直接连接到一起。设置KUKA控制器的IP地址和PC端的IP地址,两个IP地址需要在同一个网段,比如192.168.1.100和192.168.1.101。后面例子假设KUKA控制器IP地址为192.168.1.101,PC端IP地址为192.168.1.100。
下载官方例程
库卡官方提供了几个例程:目录结构如下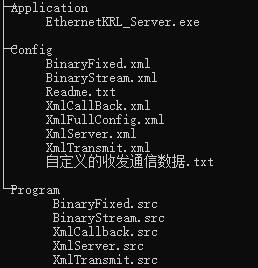
如果找不到,可以在笔者提供的资源中下载。(资源还在审核中,后续在评论区上传)。
Config文件复制与修改
把Config文件下的xml文件拷贝到kuka控制器的C:\KRC\ROBOTER\Config\User\Common\EthernetKRL路径下,把Program文件夹下的src文件拷贝到kuka编程路径下。
接下来以BinaryFixed为例说明如何进行kuka和PC的通信。
修改BinaryFixed.xml中的