一台kuka标准控制柜最多支持9个轴的驱动安装,一个rdc支持最多8个轴。
除了机器人本身的6个轴以外都被称作外部轴。
那么受到rdc的限制一台机器人可以实现2个外部轴的控制。
今天就来说说外部轴怎么配置

第一步,把硬件连接上
第二步,把配置下进去
第三步,测试运行
。。。。。。嘻嘻
哈哈,你是不是觉得太简单了!!
其实外部轴配置真的很简单
我们来细分一下吧
“第一步,把硬件连接上”:就是说我们需要把外部轴相关的硬件安装好。其中包括了外部轴的伺服驱动(KPP/KSP)这里需要注意的是KUKA生产的KPP和KSP是有大小之分的,KPP还区分带驱动的和不带驱动的。
下面列举一下:
KPP 0:只有电源功能,不可以托轴
KPP 1-40:可托一个轴,最大40A
KPP 2-40:可托二个轴,最大40A
KPP 1-64:可托一个轴,最大64A
KPP 3-20:可托三个轴,最大20A
KSP 20:可托三个轴,最大20A
KSP 40:可托三个轴,最大40A
KSP 64:可托三个轴,最大64A
知道了驱动的大小,那就说明不同型号的电机是由不同的驱动配合使用的。
当然这个配合一般只要我们选好电机的型号,订货就会帮你配好适合的驱动
如果你不知道那么可以在WorkVisual中试一下。
比如在WorkVisual中添加一个我们已知的电机

此时右下角会出现提示框
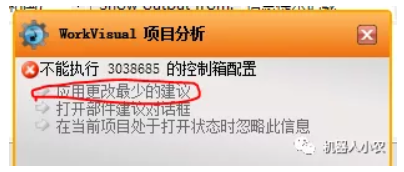
我们点“应用最少的更改建议”

我们可以看到在 控制系统组件中KPP0被制动替换成了KPP 1-40
什么?你不知道怎么添加电机?
在左边目录树的 控制柜上点右键-点ADD

点击ADD后会自动跳出选框
点击左右箭头,看到KukaDriveKinematics或者KukaExternalKinematics


就可以选择导轨或者电机了
怎么了?你的WorkVisual和我的不一样,没有这些可选吗?
那电机file-编目管理

然后会出现这样的选框
点击向右的箭头把样本导进去

怎么样了?
现在你可以尽情的配置你的外部轴啦!!
以下是付费内容-----------------------------------既然是原创,共享出来啦。
当我们添加了合适的电机并且也添加了外部轴的驱动,那么配置参数就开始了
双击电机就开始了配置工作
先看图:

1软限位,这里指的是我们这个外部轴的正负限位,此数据是要根据实际运行距离填写的。
2起始位置公差,这里不建议改动,这是外部轴启停的允许公差(其实我不知道怎么改)
3基点,做耦合轴的时候需要的,机器人可以测量基点的位置
4通用参数,是指这个电机的相关参数,也不建议更改
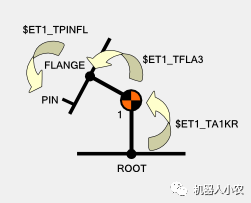
5机器转换,这是用于配置耦合的下图将告诉我们这些参数所对应的节点
6主从站参数,这里是用于填写组从控制的,我们就一个外部轴没有主从关系所以不填
下面进入马达参数配置

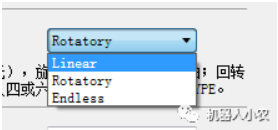
这里只需要配置几个参数
1轴的型号,Rotatory:旋转轴,Linear:直线轴,Endless:无限旋转
2减速比

如果遇到一个坑货选型,电机选小了点那么你可以通过以下参数微调


至此外部轴就配置完成了,当然外部轴的配置方法有很多,每个人也有每个人的不同,最终实现目的就行 哈哈
除了以上这些基础配置 外部轴还会涉及到耦合,多轴配置,建立模型等等,这些应用比较高级,欢迎大佬们群里讨论。我就不瞎BB了
长按二维码关注我,机器人小农。。。大家可以用微信关注这个公众号
