文章目录
0 写在前面
本书对于算法概念解释比较详尽,印象比较深的就是用图形象地比较出了数组与链表的区别,但是对算法的原理概念介绍并不是特别多的内容,只起到一个启蒙的作用,建议作为闲暇书籍或增强自信之用,笔者阅读时长约三个小时。
以下是笔者对于此书的简要笔记,个人风格浓厚,谨慎食用。
鉴于版权原因,如需要原书资源可评论,代码见github(不完全,因为简单所以懒得写了,有需要我会补充,欢迎评论)。
1 算法简介
1.1 引言
算法即一组完成任务的指令,任何代码片段都可视为算法。但本书只讲一部分,介绍的算法要么速度快,要么能解决有趣的问题,要么兼而有之。
1.2 二分查找
以最少字数猜数字为例,从1开始依次往上猜叫简单查找
二分查找即中学时代学的二分法,略
运行时间:对于包含n个元素的列表,用二分查找最多需要log2n步,而简单查找最多需要n步。
注意:仅当列表是有序的时候,二分查找才管用。
1.3 大O表示法
大O表示法即表示算法有多快。定义如下,假设列表包含n个元素。简单查找需要检查每个元素,因此需要执行n次操作。使用大O表示法,这个运行时间为O(n)。又比如对于上面的二分查找则是O(log n)
注意,大O表示法指最糟情况下的运行时间,且并不以秒为单位。
常见的大O运行时间
,也叫对数时间,这样的算法包括二分查找。
,也叫线性时间,这样的算法包括简单查找。
,比如第4章将介绍的快速排序——一种速度较快的排序算法。
,这样的算法比如第2章将介绍的选择排序——一种速度较慢的排序算法。
,这样的算法包括接下来将介绍的旅行商问题的解决方案——一种非常慢的算法。
旅行商问题
略,可谷歌
2 选择排序
2.1 内存的工作原理
写入或存储数据时,需请求计算机提供存储空间,计算机会给一个存储地址,而存储多项数据时,有两种基本方式:数组和链表
2.2 数组和链表
数组必须出于一段连续的内存地址,而链表可以在任意地方。
数组的缺点在于如果要添加新元素可能空间不够难以转移,即便预留空间也可能浪费内存,而链表相应在插入元素方面颇具优势,需要中间插入元素时,链表更好,删除元素也是
但是链表只访问中间或者最后一个元素时,必须先访问第一个元素,然后一直推到中间或者最后一个元素,效率比较低,而数组由于知道每个元素的地址就可以轻松访问
数组中元素的位置叫索引(index)
2.3 选择排序
给定一个数列按从大到小排序,可以先遍历列表找出最大数,并将其添加到新列表中,然后同理找出第二大的数,依次类推,这样需要的时间为 ,这就是选择排序
3 递归
3.2 基线条件与递归条件
注意编写涉及数组的递归函数时,基线条件通常是数组为空或只包含一个元素。陷入困境时, 请检查基线条件是不是这样的。
3.3 栈
有基本调用栈和递归调用栈
4 快速排序
分而治之(divide and conquer,D&C)是一种著名的递归式问题解决方法,比如快速排序
4.1 分而治之
私以为类似于动态规划的思路,在划分土地这个例子中有"这小块地的最大方块,也是适用于整块地的最大方块"。
4.2 快速排序
具体原理可以百度,其运行时间在平均情况下为 ,在最糟情况下为 。还有一种合并排序算法(merge sort),其运行时间总是为
快排的平均情况与最糟情况见原书4.3.2
5 散列表
即哈希表(hash),python中的散列表实现就是字典
6 广度优先搜索
广度优先搜索是一种图算法(breadth-first search, BFS),能够找出两样东西之间的最短距离,其含义有很多,如下:
-
编写国际跳棋AI,计算最少走多少步就可获胜
-
编写拼写检查器,计算最少编辑多少个地方就可将错拼的单词改成正确的单词,如将
READED改为READER需要编辑一个地方
-
根据你的人际关系网络找到关系最近的医生
6.1-6.2 图
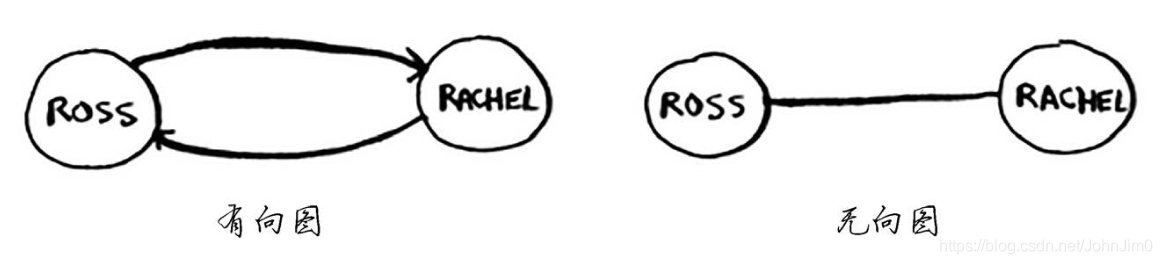
图由节点和边组成,一个节点可能与很多节点直接相连,它们称为邻居。
图分无向图与有向图,有向环形图与无向图等价,如下:
6.3 BFS
比如找到你的朋友最近的果商,先搜索所有你的朋友形成一度关系列表,然后搜索你的朋友的朋友形成二度关系列表,依次类推,直到找到果商或者遍历整个图为止,这就是广度优先搜索。
其运行时间为 ,V为图的人数或者说节点数,E为边数
7 狄克斯特拉算法
广度优先搜索只能找到总边数或者段数最少的路径,对于各边长不相同的图,如下:
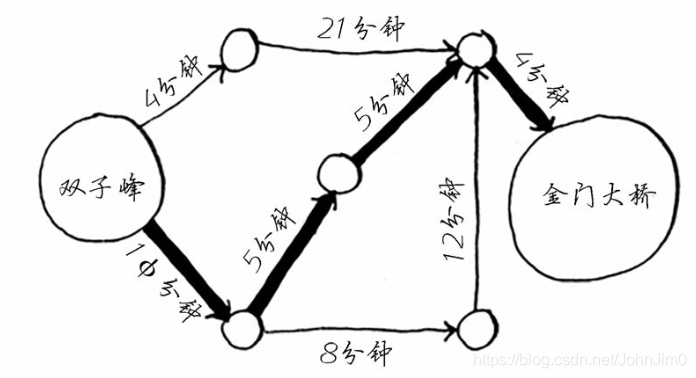
其边长有4分钟,5分钟等,此时需要用到狄克斯特拉算法。这种边长不一样或者边关联数字的,这些数字叫做权重,带权重的图为加权图,否则叫非加权图。另外注意狄克斯特拉算法只适用于有向无环图(directed acyclic graph,DAG),并且需要权重为正。如果包含负权重,需使用贝尔曼福德算法。
迪克斯特拉算法原理可以谷歌。
但是,该算法是否一定能遍历到所有节点以至于终点?暂时还不明白
8 贪婪算法
与其说是一种算法,不如说是一种策略,即每步都选择局部最优解,最终得到的就是全局最优解。但是并非在任何情况下都行之有效,但是易于实现!
上面讲的快速排序不是贪心算法,而广度优先搜索和狄克斯特拉算法都是。
NP完全问题
比如旅行商问题,详解见原书
如何判断是否NP完全
如果判断一个问题是NP完全,就不用去找到精确解,而是使用近似解。
没有一个系统的办法判断是否是NP完全问题,但是也有一些蛛丝马迹可循:
- 元素较少时算法的运行速度非常快,但随着元素数量的增加,速度会变得非常慢。
- 涉及“所有组合”的问题通常是NP完全问题。
- 不能将问题分成小问题,必须考虑各种可能的情况。这可能是NP完全问题。
- 如果问题涉及序列(如旅行商问题中的城市序列)且难以解决,它可能就是NP完全问题。
- 如果问题涉及集合(如广播台集合)且难以解决,它可能就是NP完全问题。
- 如果问题可转换为集合覆盖问题或旅行商问题,那它肯定是NP完全问题。
9 动态规划
动态规划的思路即将问题分解成各个子问题解决,具体难以理解,可通过实例一步步加深印象。
实例见原书
注意但仅当每个子问题都是离散的,即不依赖于其他子问题时,动态规划才管用。
10 K最近邻算法
略,之前机器学习实战也有
本章也有机器学习简介,列举了OCR、垃圾邮件过滤器和预测股票市场三个实例
11 接下来如何做
列举了10种未介绍的算法,即
- 树
- 反向索引
- 傅立叶变换
- 并行算法
- MapReduce,一种特殊的并行算法,即分布式算法
- 布隆过滤器和HyperLogLog
- SHA 算法,主要用于加密,SHA-0、SHA-1、SHA-2和SHA-3,前两者已发现有缺陷,最安全的目前是bcrypt
- 局部敏感的散列算法,即Simhash
- Diffie-Hellman 密钥交换,其替代者有RSA
- 线性规划
