方向导数(标量) 的计算:比如说我们给出了一个标量场函数:
u
(
x
,
y
,
z
)
u(x, y, z)
u ( x , y , z )
M
0
M_0
M 0
∂
u
∂
l
=
∂
u
∂
x
c
o
s
α
+
∂
u
∂
y
c
o
s
β
+
∂
u
∂
z
c
o
s
γ
\frac{\partial{u}}{\partial{l}} = \frac{\partial{u}}{\partial{x}}cosα + \frac{\partial{u}}{\partial{y}}cosβ + \frac{\partial{u}}{\partial{z}}cosγ
∂ l ∂ u = ∂ x ∂ u c o s α + ∂ y ∂ u c o s β + ∂ z ∂ u c o s γ
M
M
M
l
→
\overrightarrow{l}
l
那么,如果我们知道了方向
l
→
\overrightarrow{l}
l
c
o
s
α
cosα
c o s α
x
x
x
(
1
,
0
,
0
)
(1, 0, 0)
( 1 , 0 , 0 )
l
→
\overrightarrow{l}
l
c
o
s
α
cosα
c o s α
梯度,他是一个矢量。它的计算公式如下:
g
r
a
d
u
→
=
∂
u
∂
x
a
x
→
+
∂
u
∂
y
a
y
→
+
∂
u
∂
z
a
z
→
\overrightarrow{grad \space u} = \frac{\partial{u}}{\partial{x}}\overrightarrow{a_x} + \frac{\partial{u}}{\partial{y}}\overrightarrow{a_y} + \frac{\partial{u}}{\partial{z}}\overrightarrow{a_z}
g r a d u
= ∂ x ∂ u a x
+ ∂ y ∂ u a y
+ ∂ z ∂ u a z
如果当
l
→
\overrightarrow{l}
l
u
(
x
,
y
,
z
)
u(x,y,z)
u ( x , y , z )
∣
g
r
a
d
u
→
∣
=
∂
u
∂
x
2
+
∂
u
∂
y
2
+
∂
u
∂
z
2
|\overrightarrow{grad \space u} | = \sqrt{\frac{\partial{u}}{\partial{x}}^2+\frac{\partial{u}}{\partial{y}}^2+\frac{\partial{u}}{\partial{z}}^2}
∣ g r a d u
∣ = ∂ x ∂ u 2 + ∂ y ∂ u 2 + ∂ z ∂ u 2
而标量场沿着任意方向的方向导数就等于梯度在这个方向上的投影! ,表示为:
∂
u
∂
l
=
g
r
a
d
u
→
⋅
a
l
→
\frac{\partial{u}}{\partial{l}} = \overrightarrow{gradu} \sdot \overrightarrow{a_l}
∂ l ∂ u = g r a d u
⋅ a l
首先,什么是通量呢?—— 简单点说,就是单位时间内通过某一面积的曲面的量 。
我们以下面这个不封闭的曲面为例:我们可以将这个大曲面(设面积为
S
S
S
d
S
dS
d S
d
S
dS
d S
a
n
→
\overrightarrow{a_n}
a n
对于不封闭的曲面来说,其单位法向矢量与曲面构成右手螺旋定则。因此,下图中的
a
n
→
\overrightarrow{a_n}
a n
通过
d
S
dS
d S
A
→
\overrightarrow{A}
A
a
n
→
\overrightarrow{a_n}
a n
S
S
S
Φ
=
∬
S
A
→
⋅
a
n
→
d
S
(1)
Φ=\iint_S\overrightarrow{A}\sdot \overrightarrow{a_n} \space dS\tag{1}
Φ = ∬ S A
⋅ a n
d S ( 1 )
A
→
\overrightarrow{A}
A
a
n
→
\overrightarrow{a_n}
a n
A
→
\overrightarrow{A}
A
a
n
→
\overrightarrow{a_n}
a n
S
S
S
Φ
=
∯
S
A
→
⋅
a
n
→
d
S
(2)
Φ = \oiint_S\overrightarrow{A}\sdot \overrightarrow{a_n} \space dS\tag{2}
Φ = ∬
S A
⋅ a n
d S ( 2 ) 注意:从上式的形式可以看出:通量是个标量!
下面我们就想啊:假如是闭合曲面,讲道理净通量
Φ
Φ
Φ
如果
Φ
>
0
Φ >0
Φ > 0 ,使得穿出曲面的矢量线条数增加了。如果
Φ
>
0
Φ >0
Φ > 0 ,它会吸收穿入曲面的一些 “能量”(矢量线),使得穿出曲面的矢量线条数减小了。
如果我们再定义一个通量源密度 ,也就是单位体积内的通量大小。
∯
S
A
→
⋅
a
n
→
d
S
V
\frac{\oiint_S\overrightarrow{A}\sdot \overrightarrow{a_n} \space dS}{V}
V ∬
S A
⋅ a n
d S
V
→
0
V\to0
V → 0
d
i
v
A
→
=
lim
V
→
0
∯
S
A
→
⋅
a
n
→
d
S
V
div\overrightarrow{A} = \lim_{V\to0}\frac{\oiint_S\overrightarrow{A}\sdot \overrightarrow{a_n} \space dS}{V}
d i v A
= V → 0 lim V ∬
S A
⋅ a n
d S 说明:散度也是一个标量!
但是,在应用过程中,使用定义式直接计算散度相当麻烦,我们下面给出一个更好用的式子:
我们看这个长方体的最左下角的
M
M
M
M
(
x
,
y
,
z
)
M(x, y, z)
M ( x , y , z )
△
y
,
△
x
,
△
z
△y, △x, △z
△ y , △ x , △ z
在
M
M
M
A
→
=
A
x
a
x
→
+
A
y
a
y
→
+
A
z
a
z
→
\overrightarrow{A} = A_x\overrightarrow{a_x}+A_y\overrightarrow{a_y}+A_z\overrightarrow{a_z}
A
= A x a x
+ A y a y
+ A z a z
这里特别注意:
A
x
,
A
y
,
A
z
A_x, A_y,A_z
A x , A y , A z
(
x
,
y
,
z
)
(x,y,z)
( x , y , z )
我们下面先看看长方体前面的通量:
∯
S
1
A
→
⋅
a
f
r
o
n
t
→
d
S
=
∯
S
1
A
x
d
S
=
A
x
(
x
+
△
x
,
y
,
z
)
△
y
△
z
\oiint_{S1}\overrightarrow{A}\sdot \overrightarrow{a_{front}} dS = \oiint_{S1}A_xdS = A_x(x+△x, y, z)△y△z
∬
S 1 A
⋅ a f r o n t
d S = ∬
S 1 A x d S = A x ( x + △ x , y , z ) △ y △ z
f
(
x
)
f(x)
f ( x )
x
0
x_0
x 0
f
(
x
)
=
f
(
x
0
)
0
!
+
f
′
(
x
0
)
1
!
(
x
−
x
0
)
+
f
′
′
(
x
0
)
2
!
(
x
−
x
0
)
2
+
⋯
f(x) = \frac{f(x_0)}{0!} + \frac{f'(x_0)}{1!}(x-x_0) + \frac{f''(x_0)}{2!}(x-x_0)^2 + \cdots
f ( x ) = 0 ! f ( x 0 ) + 1 ! f ′ ( x 0 ) ( x − x 0 ) + 2 ! f ′ ′ ( x 0 ) ( x − x 0 ) 2 + ⋯
x
x
x
x
+
△
x
x+△x
x + △ x
x
0
x_0
x 0
x
x
x
f
(
)
f()
f ( )
A
x
(
)
A_x()
A x ( )
A
x
(
x
+
△
x
,
y
,
z
)
=
A
x
(
x
,
y
,
z
)
+
∂
A
x
(
x
,
y
,
z
)
∂
x
△
x
+
1
2
∂
2
A
x
(
x
,
y
,
z
)
∂
x
2
△
x
2
+
⋯
A_x(x+△x,y,z) =A_x(x,y,z)+\frac{\partial A_x(x,y,z)}{\partial x}△x + \frac{1}{2}\frac{\partial^2 A_x(x,y,z)}{\partial x^2}△x^2+\cdots
A x ( x + △ x , y , z ) = A x ( x , y , z ) + ∂ x ∂ A x ( x , y , z ) △ x + 2 1 ∂ x 2 ∂ 2 A x ( x , y , z ) △ x 2 + ⋯
A
x
(
x
+
△
x
,
y
,
z
)
≈
A
x
(
x
,
y
,
z
)
+
∂
A
x
(
x
,
y
,
z
)
∂
x
△
x
A_x(x+△x,y,z) ≈ A_x(x,y,z)+\frac{\partial A_x(x,y,z)}{\partial x}△x
A x ( x + △ x , y , z ) ≈ A x ( x , y , z ) + ∂ x ∂ A x ( x , y , z ) △ x
因此,前面的净通量就近似表示成:
∯
S
1
A
→
⋅
a
f
r
o
n
t
→
d
S
≈
A
x
(
x
,
y
,
z
)
△
y
△
z
+
∂
A
x
(
x
,
y
,
z
)
∂
x
△
x
△
y
△
z
\oiint_{S1}\overrightarrow{A}\sdot \overrightarrow{a_{front}} dS ≈A_x(x,y,z)△y△z+\frac{\partial A_x(x,y,z)}{\partial x}△x△y△z
∬
S 1 A
⋅ a f r o n t
d S ≈ A x ( x , y , z ) △ y △ z + ∂ x ∂ A x ( x , y , z ) △ x △ y △ z
A
x
a
x
→
A_x\overrightarrow{a_x}
A x a x
x
x
x
a
b
a
c
k
→
\overrightarrow{a_{back}}
a b a c k
∯
S
2
A
→
⋅
a
b
a
c
k
→
d
S
=
−
A
x
(
x
,
y
,
z
)
△
y
△
z
\oiint_{S2}\overrightarrow{A}\sdot \overrightarrow{a_{back}} dS = -A_x(x,y,z)△y△z
∬
S 2 A
⋅ a b a c k
d S = − A x ( x , y , z ) △ y △ z
那么,我们就可以得到前后两个面的净通量:
Φ
f
r
o
n
t
+
Φ
b
a
c
k
=
A
x
(
x
,
y
,
z
)
△
y
△
z
+
∂
A
x
(
x
,
y
,
z
)
∂
x
△
x
△
y
△
z
−
A
x
(
x
,
y
,
z
)
△
y
△
z
=
∂
A
x
(
x
,
y
,
z
)
∂
x
△
x
△
y
△
z
\begin{aligned} Φ_{front} + Φ_{back} &= A_x(x,y,z)△y△z+\frac{\partial A_x(x,y,z)}{\partial x}△x△y△z - A_x(x,y,z)△y△z\\ &=\frac{\partial A_x(x,y,z)}{\partial x}△x△y△z \end{aligned}
Φ f r o n t + Φ b a c k = A x ( x , y , z ) △ y △ z + ∂ x ∂ A x ( x , y , z ) △ x △ y △ z − A x ( x , y , z ) △ y △ z = ∂ x ∂ A x ( x , y , z ) △ x △ y △ z
那么,如果我们求出前后左右上下六个面的净通量,就可以表示成:
Φ
t
o
t
a
l
=
∂
A
x
(
x
,
y
,
z
)
∂
x
△
x
△
y
△
z
+
∂
A
y
(
x
,
y
,
z
)
∂
y
△
x
△
y
△
z
+
∂
A
z
(
x
,
y
,
z
)
∂
z
△
x
△
y
△
z
Φ_{total} = \frac{\partial A_x(x,y,z)}{\partial x}△x△y△z + \frac{\partial A_y(x,y,z)}{\partial y}△x△y△z + \frac{\partial A_z(x,y,z)}{\partial z}△x△y△z
Φ t o t a l = ∂ x ∂ A x ( x , y , z ) △ x △ y △ z + ∂ y ∂ A y ( x , y , z ) △ x △ y △ z + ∂ z ∂ A z ( x , y , z ) △ x △ y △ z
△
V
=
△
x
△
y
△
z
△V = △x△y△z
△ V = △ x △ y △ z
Φ
t
o
t
a
l
=
∂
A
x
(
x
,
y
,
z
)
∂
x
△
V
+
∂
A
y
(
x
,
y
,
z
)
∂
y
△
V
+
∂
A
z
(
x
,
y
,
z
)
∂
z
△
V
Φ_{total} = \frac{\partial A_x(x,y,z)}{\partial x}△V + \frac{\partial A_y(x,y,z)}{\partial y}△V + \frac{\partial A_z(x,y,z)}{\partial z}△V
Φ t o t a l = ∂ x ∂ A x ( x , y , z ) △ V + ∂ y ∂ A y ( x , y , z ) △ V + ∂ z ∂ A z ( x , y , z ) △ V
d
i
v
A
→
=
∂
A
x
(
x
,
y
,
z
)
∂
x
+
∂
A
y
(
x
,
y
,
z
)
∂
y
+
∂
A
z
(
x
,
y
,
z
)
∂
z
=
∂
A
x
∂
x
+
∂
A
y
∂
y
+
∂
A
z
∂
z
\begin{aligned} div\overrightarrow{A} &= \frac{\partial A_x(x,y,z)}{\partial x} + \frac{\partial A_y(x,y,z)}{\partial y} + \frac{\partial A_z(x,y,z)}{\partial z}\\ &=\frac{\partial A_x}{\partial x} + \frac{\partial A_y}{\partial y} + \frac{\partial A_z}{\partial z} \end{aligned}
d i v A
= ∂ x ∂ A x ( x , y , z ) + ∂ y ∂ A y ( x , y , z ) + ∂ z ∂ A z ( x , y , z ) = ∂ x ∂ A x + ∂ y ∂ A y + ∂ z ∂ A z
d
i
v
A
→
>
0
div\overrightarrow{A} > 0
d i v A
> 0
d
i
v
A
→
<
0
div\overrightarrow{A} < 0
d i v A
< 0
d
i
v
A
→
=
0
div\overrightarrow{A} = 0
d i v A
= 0
下面我们定义一个以后非常常用的算子:
▽
\triangledown
▽ 矢量微分算子 )
▽
=
∂
∂
x
a
x
→
+
∂
∂
y
a
y
→
+
∂
∂
z
a
z
→
\triangledown = \frac{\partial }{\partial x}\overrightarrow{a_x} + \frac{\partial}{\partial y}\overrightarrow{a_y} + \frac{\partial }{\partial z}\overrightarrow{a_z}
▽ = ∂ x ∂ a x
+ ∂ y ∂ a y
+ ∂ z ∂ a z
因此,散度就可以表示成:
d
i
v
A
→
=
▽
⋅
A
→
div\overrightarrow{A} = \triangledown \sdot \overrightarrow{A}
d i v A
= ▽ ⋅ A
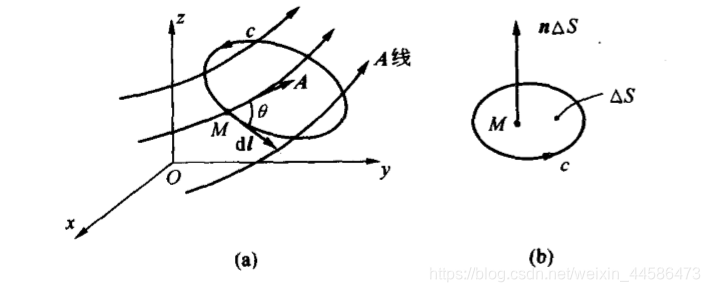
散度表示矢量场内一点的吸收或者辐射程度
先看看下面的 (a)图,考虑这样一个
A
→
\overrightarrow{A}
A
c
c
c
c
c
c
我们先从线圈的一个点开始计算:
假设在线圈上一点
M
M
M
d
l
→
\overrightarrow{dl}
d l
A
→
\overrightarrow{A}
A
A
→
\overrightarrow{A}
A
d
l
→
\overrightarrow{dl}
d l
因此,在这一个点 M 上,所受到的风力大小就是:
A
→
⋅
d
l
→
\overrightarrow{A}\sdot \overrightarrow{dl}
A
⋅ d l
∮
c
A
→
⋅
d
l
→
\oint_c\overrightarrow{A}\sdot \overrightarrow{dl}
∮ c A
⋅ d l
而其实,如果我们假设这个线圈
c
c
c
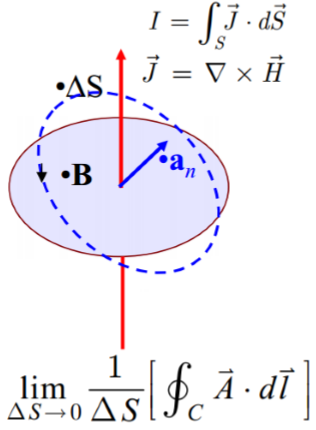
因此,和推导散度类似的办法,假设线圈的面积是 S,如果令 S 无限趋近于0,就可以缩到如图(b)所示的一个点 M,我们有:
lim
S
→
0
∮
c
A
→
⋅
d
l
→
S
\lim_{S\to 0}\frac{\oint_c\overrightarrow{A}\sdot \overrightarrow{dl}}{S}
S → 0 lim S ∮ c A
⋅ d l
这个叫做矢量场
A
→
\overrightarrow{A}
A
n
→
\overrightarrow{n}
n
欸???按照类比的思路,这里的形式不应该是旋量吗?——但是你别忘了,旋量是一个矢量,它还有方向。开始,经过 M 点的平面有无穷多个,那么方向也就是无穷多个。显然不符合旋量的定义。
如图,假设我们的磁场
B
→
\overrightarrow{B}
B
B
→
\overrightarrow{B}
B
因此,我们定义环量面密度最大的时候,环量面密度的模值就是旋量的模值,该环线所围的面积的法向就是旋量的方向。记为:
r
o
t
A
→
rot\overrightarrow{A}
r o t A
公式就直接给出来:
r
o
t
A
→
=
▽
×
A
→
rot\overrightarrow{A} = \triangledown × \overrightarrow{A}
r o t A
= ▽ × A
r
o
t
A
→
=
▽
×
A
→
=
[
a
x
→
a
y
→
a
z
→
∂
∂
x
∂
∂
x
∂
∂
x
A
x
A
y
A
Z
]
rot\overrightarrow{A} = \triangledown × \overrightarrow{A} = \begin{bmatrix} \overrightarrow{a_x} & \overrightarrow{a_y} & \overrightarrow{a_z}\\ \\ \frac{\partial }{\partial x} & \frac{\partial }{\partial x} & \frac{\partial }{\partial x}\\ \\ A_x & A_y & A_Z \end{bmatrix}
r o t A
= ▽ × A
= ⎣ ⎢ ⎢ ⎢ ⎢ ⎡ a x
∂ x ∂ A x a y
∂ x ∂ A y a z
∂ x ∂ A Z ⎦ ⎥ ⎥ ⎥ ⎥ ⎤
旋度的散度等于0:
▽
⋅
(
▽
×
A
→
)
=
0
\triangledown \sdot (\triangledown ×\overrightarrow{A}) = 0
▽ ⋅ ( ▽ × A
) = 0
梯度的旋度等于0:
▽
×
(
▽
u
)
=
0
\triangledown × (\triangledown u) = 0
▽ × ( ▽ u ) = 0
在这篇
B
l
o
g
Blog
B l o g 再简单说明一个问题:
▽
\triangledown
▽ ,我们举两个例子:
▽
(
u
v
)
\triangledown{(uv)}
▽ ( u v )
▽
\triangledown
▽
u
v
uv
u v
u
v
uv
u v
u
▽
v
+
v
▽
u
u\triangledown{v} + v\triangledown{u}
u ▽ v + v ▽ u
【2】因为向量有下面这个性质:
A
→
⋅
(
B
→
×
C
→
)
=
B
→
⋅
(
A
→
×
C
→
)
=
C
→
⋅
(
A
→
×
B
→
)
\overrightarrow{A}\sdot (\overrightarrow{B} × \overrightarrow{C}) = \overrightarrow{B}\sdot (\overrightarrow{A} × \overrightarrow{C}) = \overrightarrow{C}\sdot (\overrightarrow{A} × \overrightarrow{B})
A
⋅ ( B
× C
) = B
⋅ ( A
× C
) = C
⋅ ( A
× B
)
▽
\triangledown
▽
▽
⋅
(
B
→
×
C
→
)
=
B
→
⋅
(
▽
×
C
→
)
=
C
→
⋅
(
▽
×
B
→
)
\triangledown\sdot (\overrightarrow{B} × \overrightarrow{C}) = \overrightarrow{B}\sdot (\triangledown × \overrightarrow{C}) = \overrightarrow{C}\sdot (\triangledown × \overrightarrow{B})
▽ ⋅ ( B
× C
) = B
⋅ ( ▽ × C
) = C
⋅ ( ▽ × B
)
▽
\triangledown
▽