无人驾驶实践进阶——Apollo硬件开发平台
职业三大块
分析规划
产品设计
产品运营
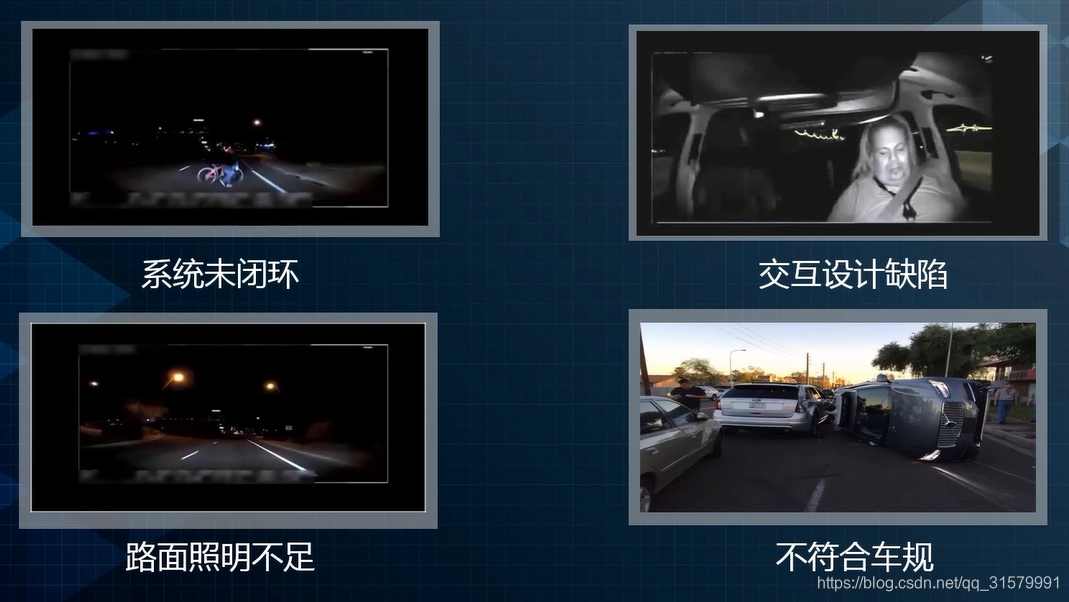
事故分析
可能原因:
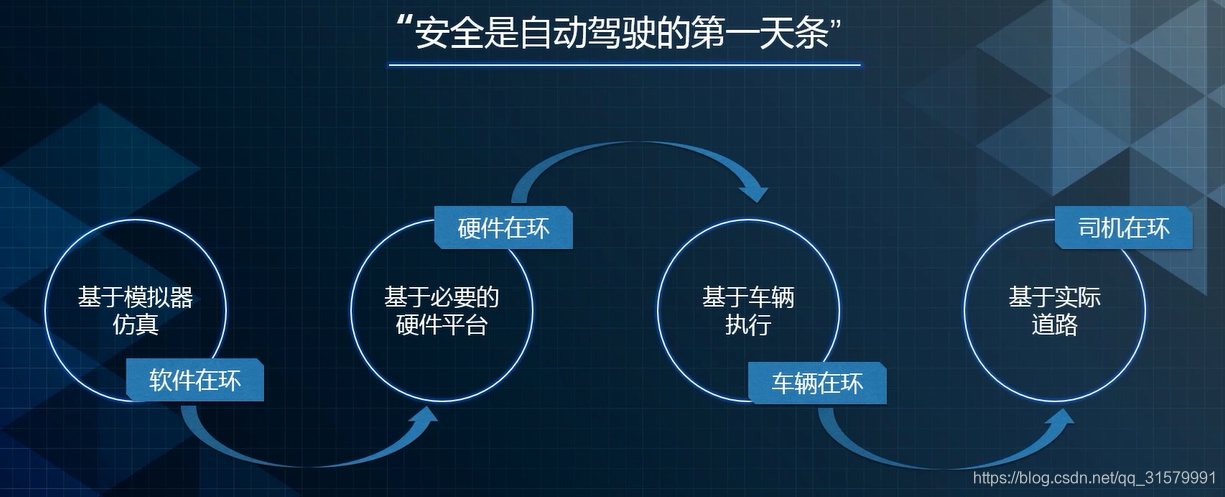
自动驾驶研发流程
软件在环、硬件在环、车辆在环和司机在环
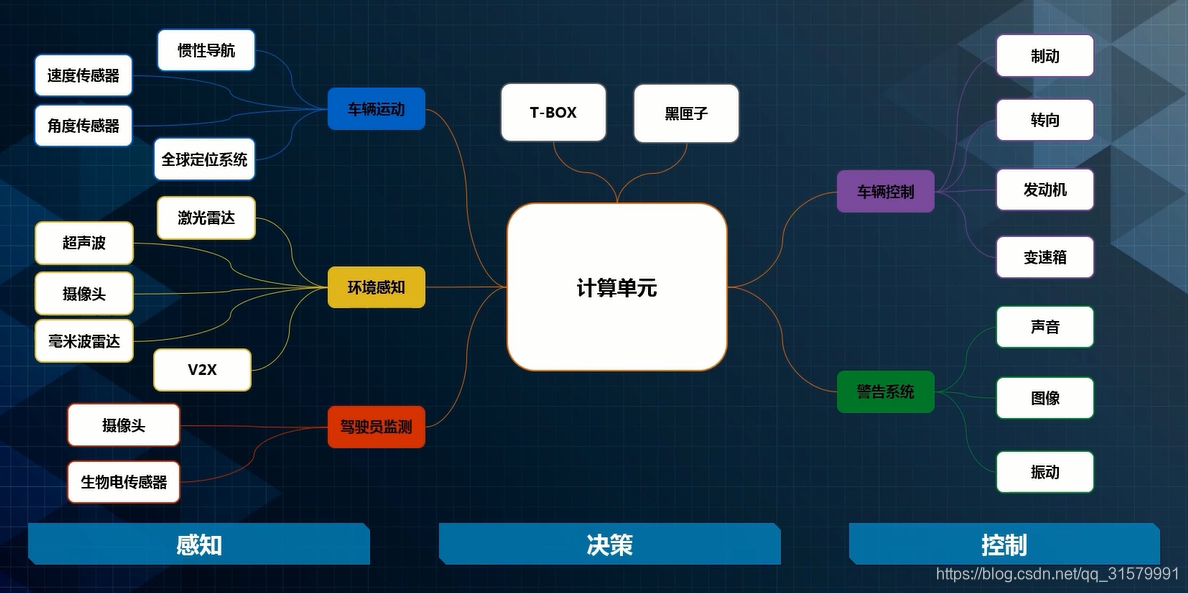
自动驾驶的硬件系统
主要分为:感知、决策和控制三大块
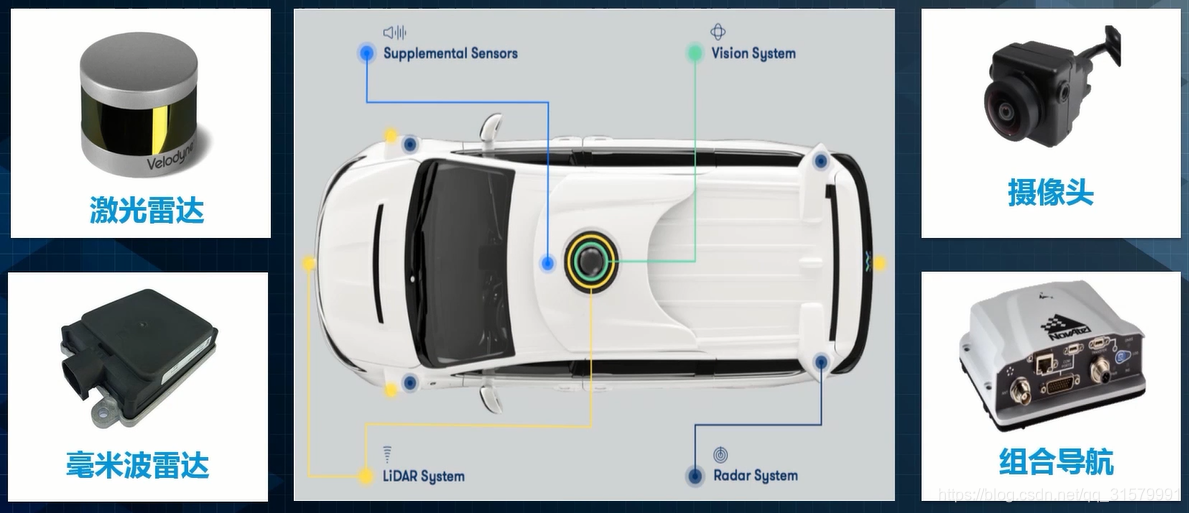
自动驾驶核心传感器
ISP:图像处理器
双目:通过两图像的视觉差进行计算
激光雷达:ToF,利用光发射到APD到接受计算,根据扫描原理分为同轴旋转、棱镜旋转、MEMS、OPA相控阵和Flash等,还可用于地图测绘
毫米波雷达:利用发射的电磁波观察回波的摄入差异,主要有24G和77G(近、远)
组合导航:通过GNSS板卡接受所有可见的GPS卫星信号,进行解算和计算得出位置,有遮挡时,需要融合惯导信息
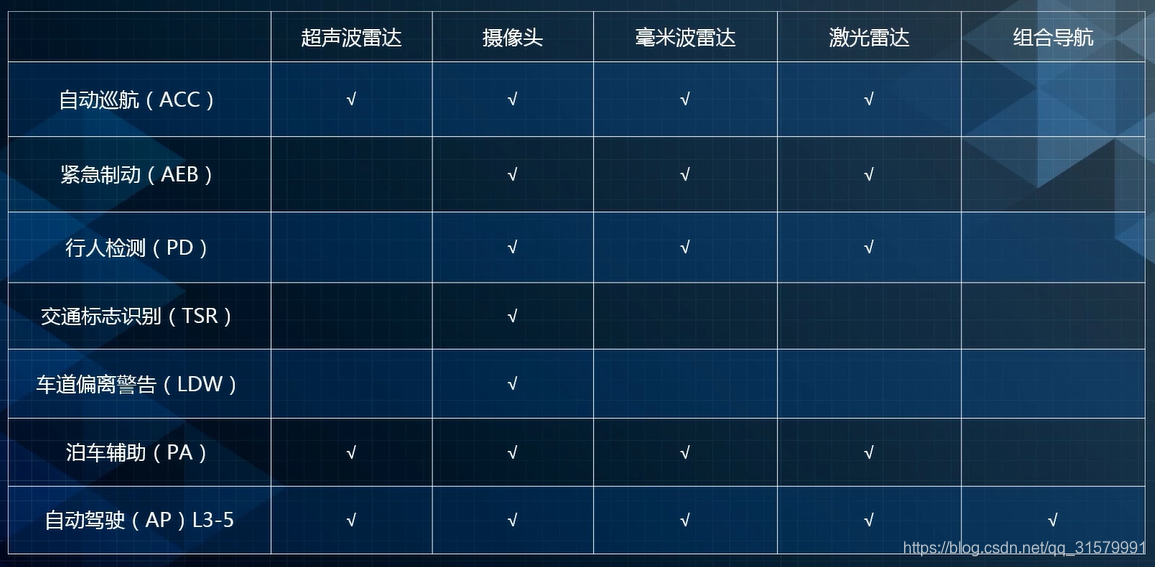
不同功能所需传感器
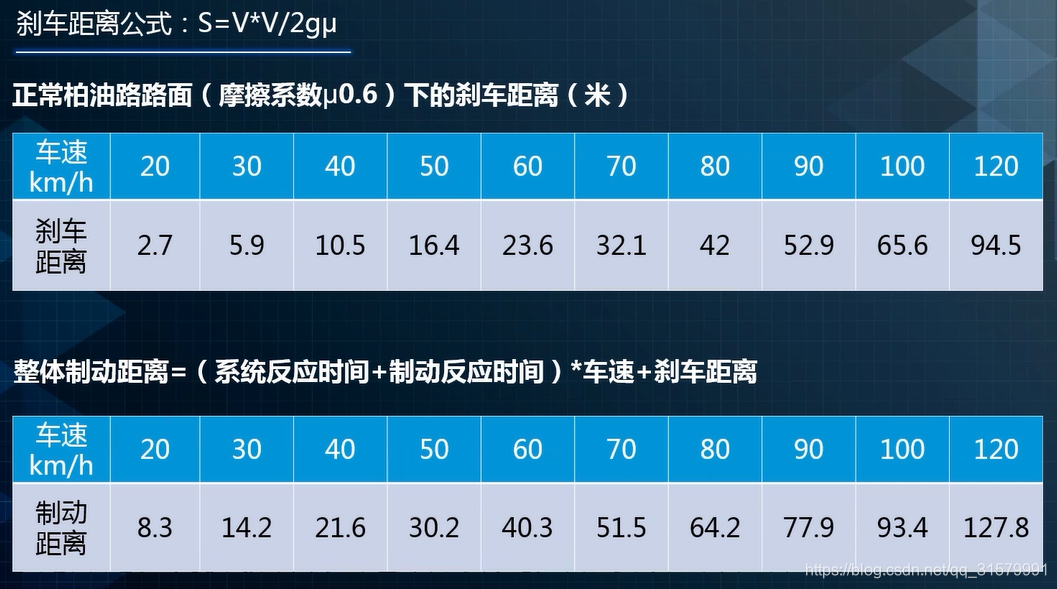
目前自动驾驶理论制动和实际制动情况
目前发展方向
传感器融合

计算单元
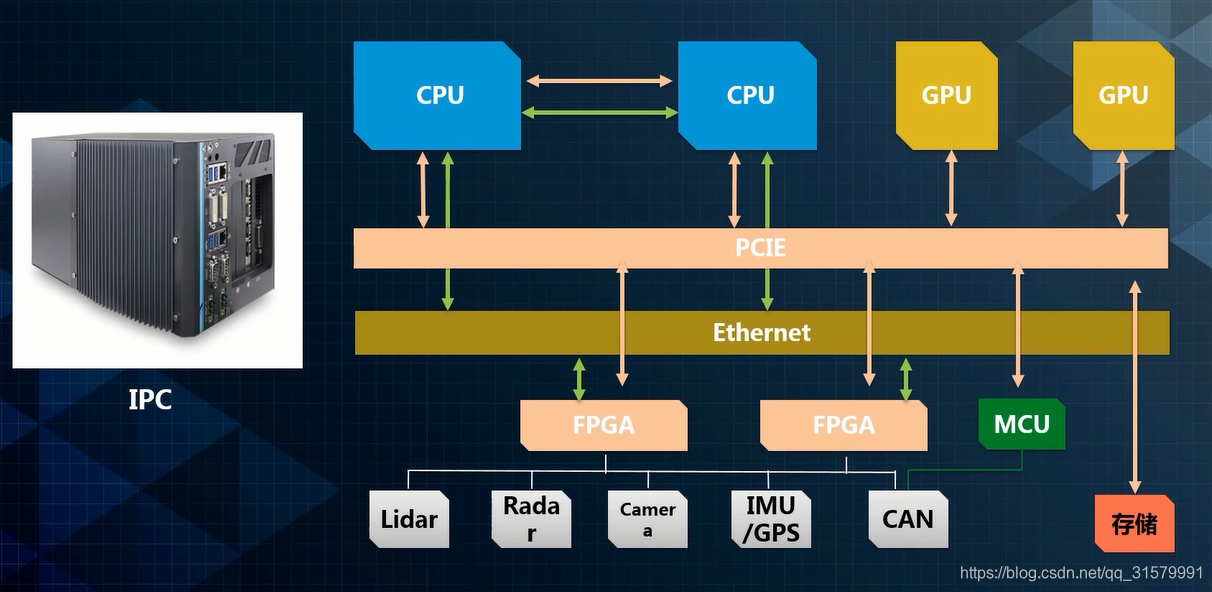
目前情况:
体积大、功耗高,但适用于自动驾驶的计算迭代
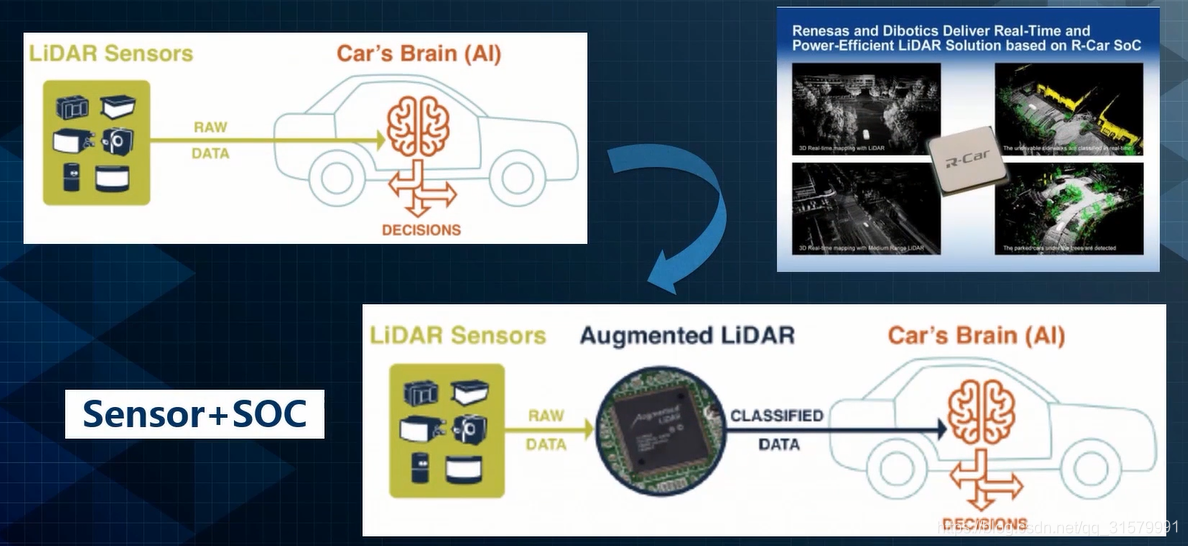
处理步骤
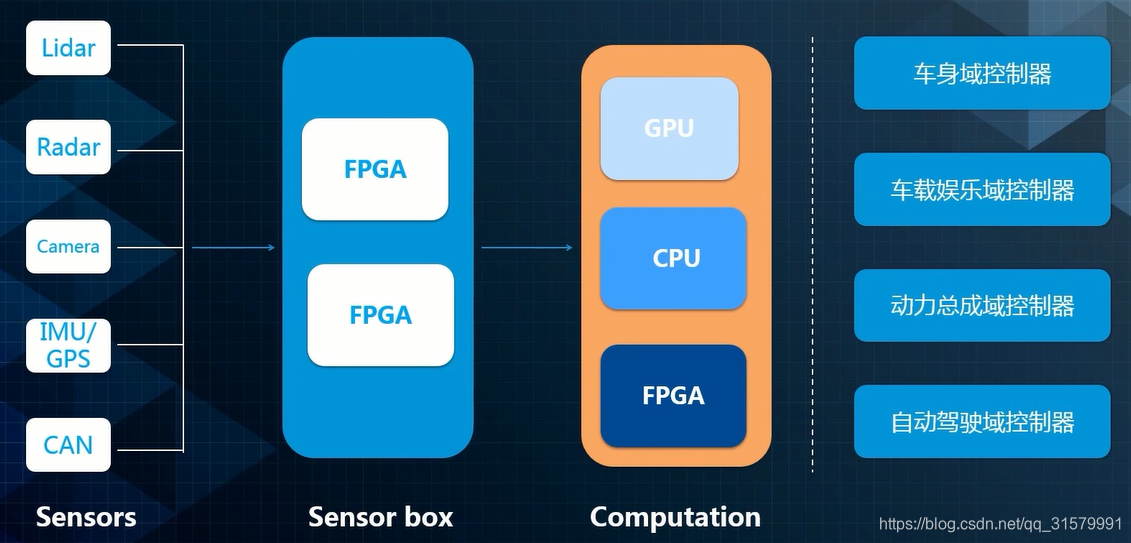
系统集中到芯片中
好处:降低后端处理计算量,在传感器内部实现一些计算
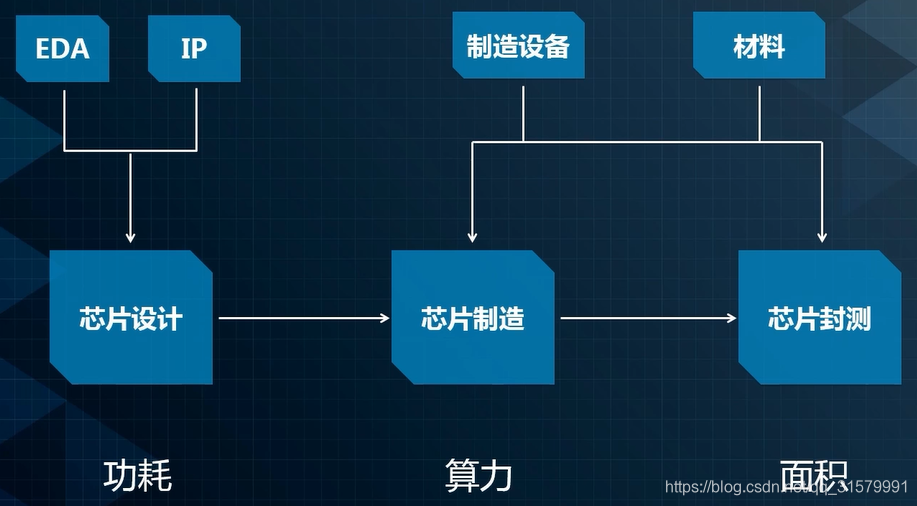
芯片设计流程:
整体分为:芯片设计、芯片制造和芯片封装
目前半导体工艺正从深紫外DUV向极紫外EUV发展,向7nm工艺发展
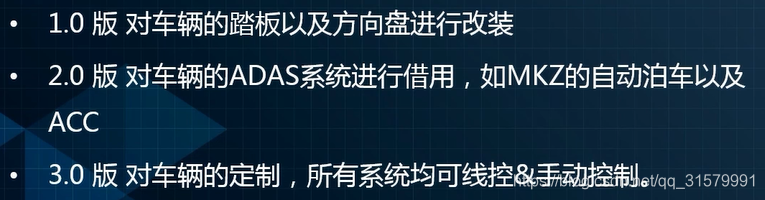
线控系统
减速控制、转向控制和加速控制
使用EHB(电子液压制动系统)进行控制

线控发展情况:
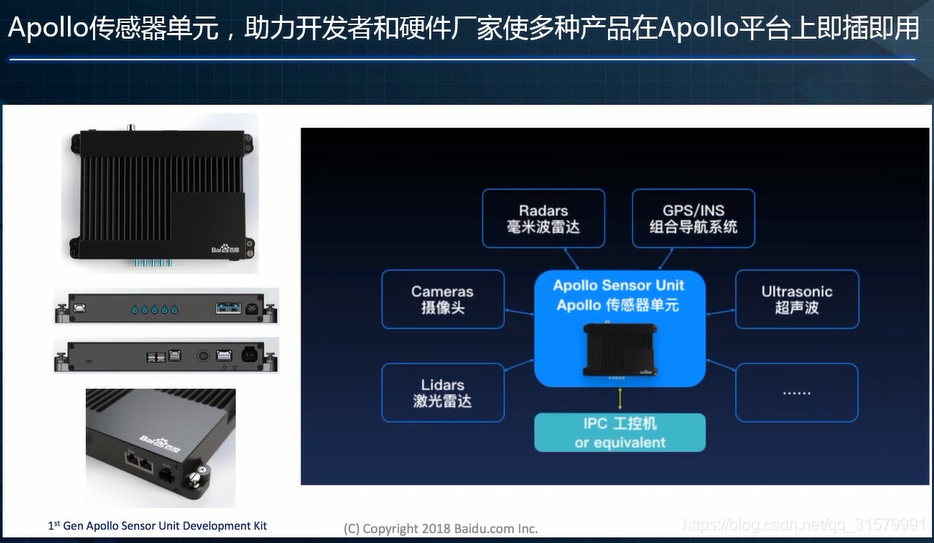
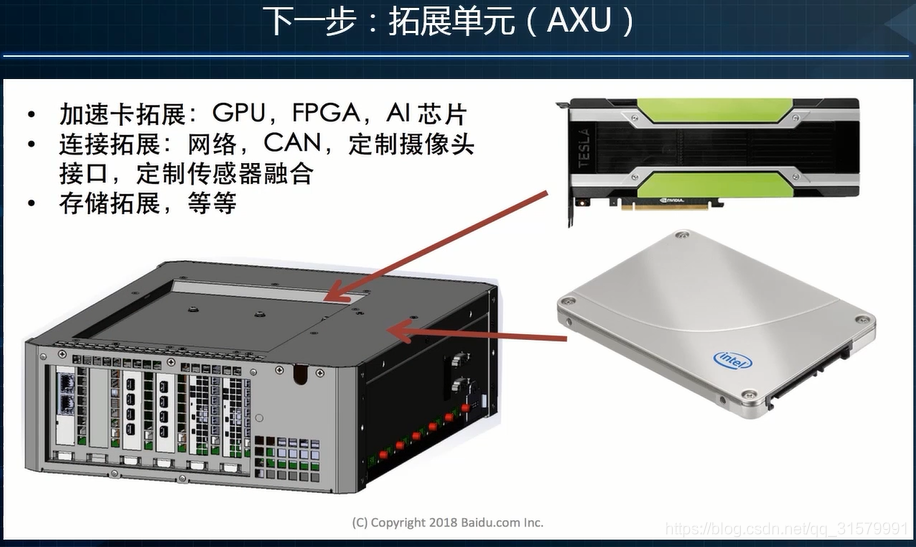
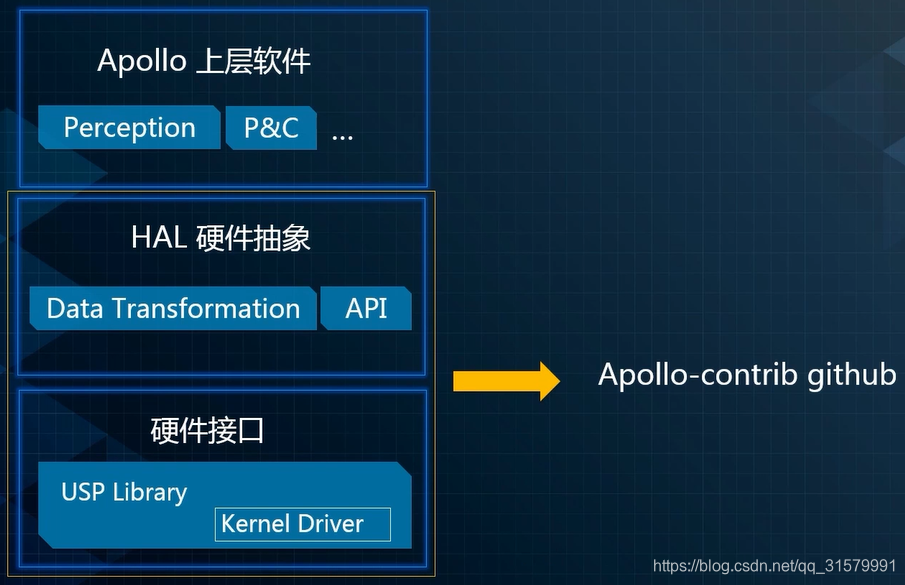
Apollo硬件开发平台

整体抽象层:
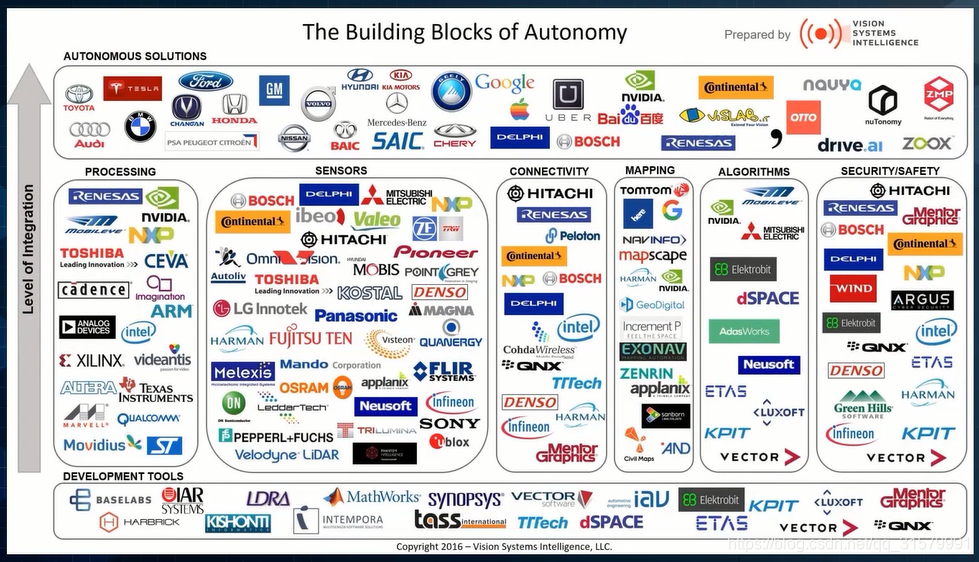
自动驾驶产业链布局
多个十万亿聚的产业链的聚合体