无人驾驶实践入门——控制
定义:
驱使车辆前行的策略
基本控制输入:
转向、加速和制动
控制要求:
使控制输入经过拟合的路径点
控制策略对汽车具有可行性
平稳度
三种控制策略:
比例积分微分控制(PID)
线性二次调节器(LQR)
模型预测控制(MPC)
控制器输入:
目标轨迹,来自规划模块
车辆状态,来自本地化模块
控制器输出:
控制输入(转向、加速和制动)的值
PID控制
组成:
比例P
积分I
微分D
特点:
简单
多数情况下效果良好
线性算法,不适用于非常复杂的系统
依赖实时测量误差
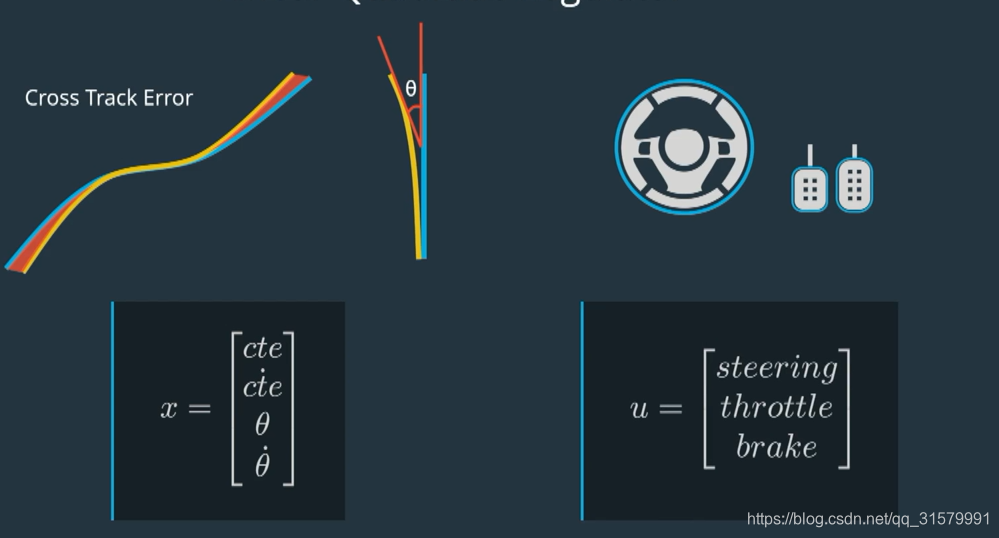
线性二次调节器(LQR)
横向控制组件:
横向误差
横向误差变化率
朝向误差
朝向误差变化率
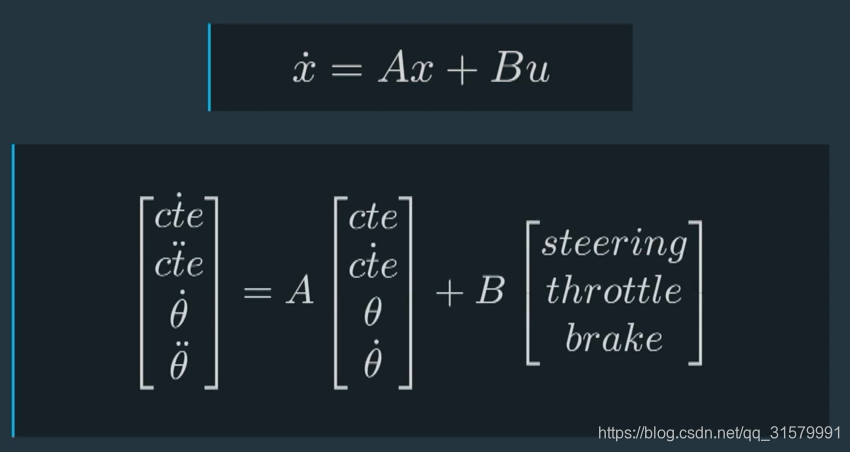
控制模型:
控制输入集称为u
四个组件集合称为x
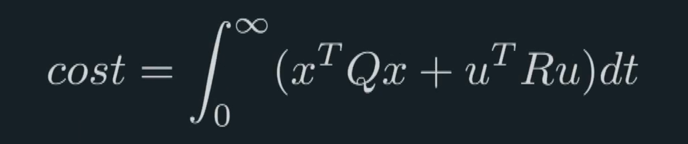
成本函数:
模型预测控制(MPC)
步骤:
建立车辆模型
使用优化引擎计算有限时间内的控制输入
执行第一组控制输入
重复优化序列
特点:
比PID更精确
适用于不同的成本函数
更复杂、更缓慢、更难以实现