无人驾驶实践入门——预测
预测对象:
动态物体
预测方法:
生成一条路径预测物体行为
预测要求:
实时性
准确性
能够学习新行为,面对复杂情况
两种不同预测方式:
基于模型的预测:
构建候选模型,通过分析选择预测结果
直观性好,模仿了人类行为
数据驱动预测:
使用机器学习,通过观察结果实现预测
训练数据越多,训练效果越好
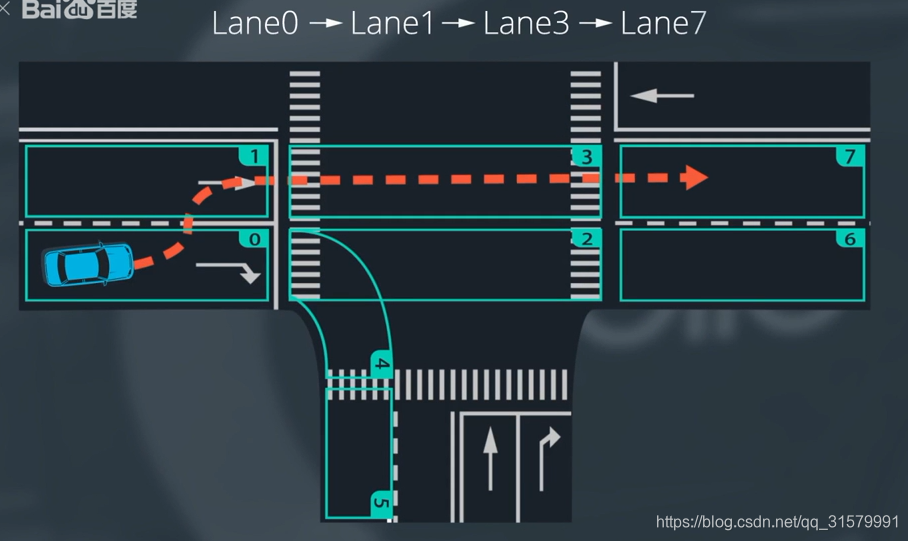
车道预测
预测方法:
车道序列方法
预测原理:
将车辆行为划分为有限的模式组合,将这些模式组合描述为车道序列
物体状态
考虑内容:
物体到车道线的间距,时间间隔状态信息等
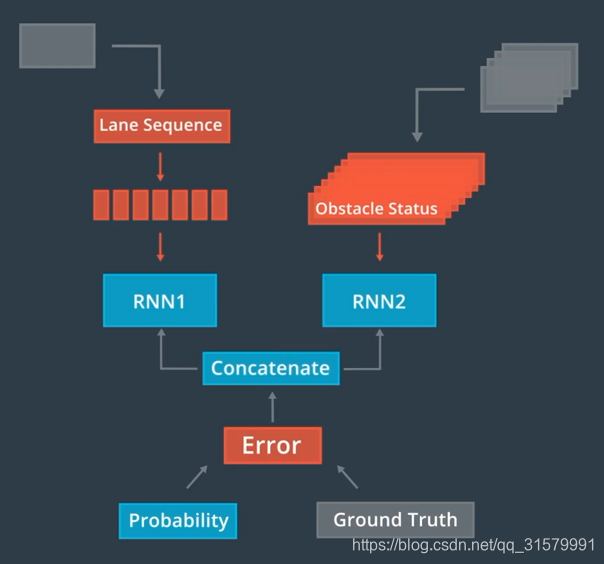
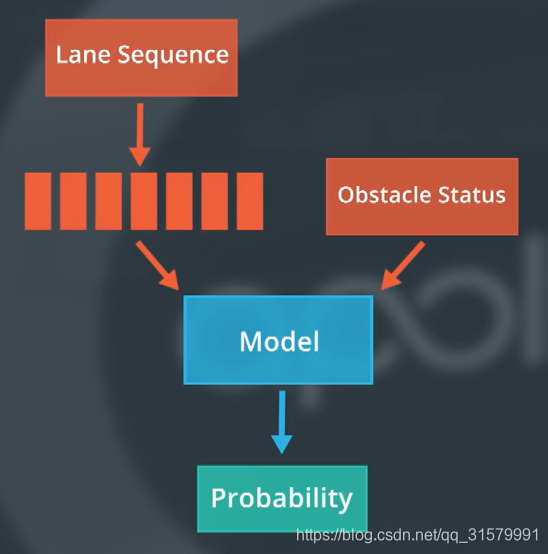
目标车道预测
预测方法:
计算每个车道序列的概率
通过模型将车辆状态和车道段作为输入
通过观测数据对模型进行经验训练
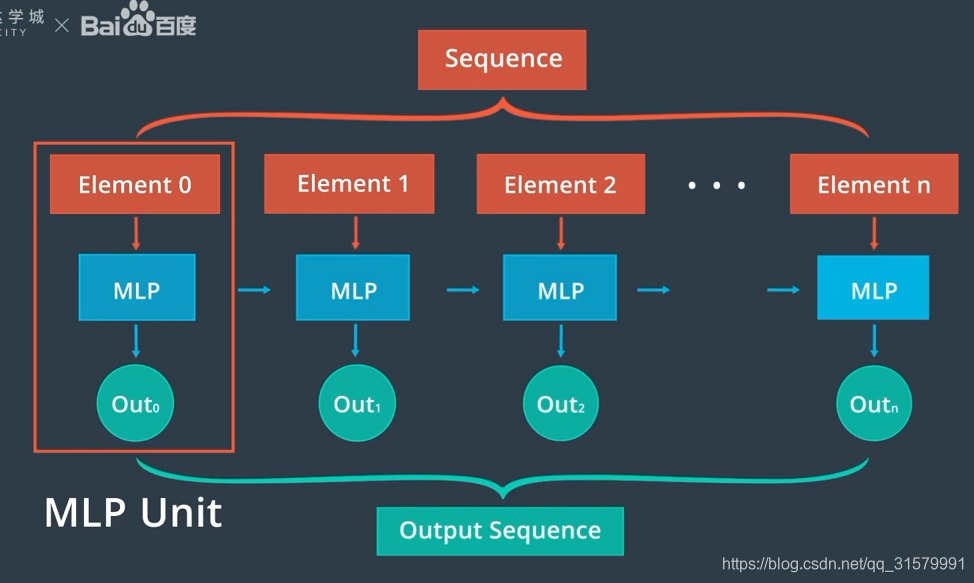
递归神经网络(RNN)
原理:
利用时间序列数据特征进行预测
区别:
多重结构的递归神经单元,即MLP
每个MLP将序列中一个元素作为输入并预测序列的下一个元素作为输出
每个MLP单元之间有一个额外的连接
轨迹生成
生成方案:
设置约束调节(考虑车速、位置等)
拟合多项式模型
Apollo应用
使用RNN建立模型预测目标车道
应用反向传播训练网络