
更多塔克创新资讯欢迎登陆【塔克社区 www.xtark.cn 】【塔克博客 www.cnblogs.com/xtark/ 】
X-CTR100控制器具有红外接收头,例程实现NEC协议的红外遥控器进行解码显示,遥控器需要自行准备。
原理
红外遥控是一种广泛应用的通信和控制手段,由于其结构简单、功耗低、抗干扰能力强、可靠性高及成本低等优点而广泛应用于家用电器、工业控制和智能仪器系统中。通用红外遥控系统由发射和接收两大部分组成。应用编码/解码专用集成电路芯片来进行控制操作。
通用红外遥控系统由发射和接收两大部分组成。应用编码/解码专用集成电路芯片来进行控制操作,如图所示。发射部分包括键盘矩阵、编码调制、LED红外发送器;接收部分包括光、电转换放大器、解调、解码电路。

红外遥控器是通过发送一定的控制信号来实现对电器的控制,这个控制信号就是一串红外脉冲编码信号。通过发送的不同编码脉冲来表示不同的功能按键信号,电器通过红外接收系统接收到编码脉冲,并进行相应的解码执行相应的功能,这样就实现了红外遥控家用电器的目的。由此可见编码在红外遥控系统中的重要性,不过编码方式目前还没有一个统一的国际标准,每个生产厂家所使用的编码格式各不相同。目前使用的编码标准主要有RC5、NEC、SONY、REC80、SAMSWNG等,主要是欧洲和日本生产厂家所使用的编码格式。国内家用电器的生产厂家,其编码方式多数是按照上述的各种编码方式进行编码的,应用较多的是NEC型编码方式。
本教程以常用的NEC编码标准进行说明,例程也是针对NEC编码遥控器设计。

NEC标准:遥控载波的频率为38KHz(占空比1:3)当某个键按下时,系统首先发射一个完整的全码,如果按键超过108ms仍未松开,接下来发射的代码(连发代码)将由起始码(9ms)和结束码(2.5ms)组成。
一个完整的全码 = 引导码 +用户码 +用户码 + 数据码 + 数据码 + 数据反码。
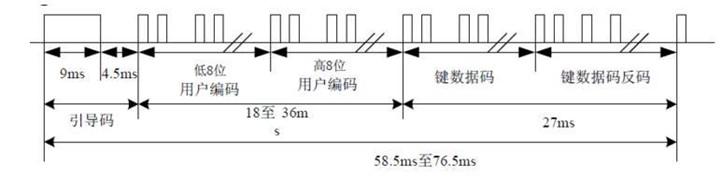
其中,引导码高电平9ms,低电平4.5ms;系统码8位,数据码8位,共32位;其中前16位为用户识别码,能区别不同的红外遥控设备,以防止不同的机种遥控码互相干扰。后16位为8位的操作码和8位的操作反码,用于核对数据是否接收准确。收端根据数据码做出应该执行上面动作的判断。连发代码是在持续按键时发送的码。它告知接收端。某键是在被连续的按着。
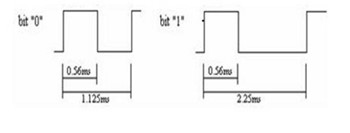
NEC标准下的发射码表示发射数据0时用"0.56ms高电平 + 0.565ms低电平 = 1.125ms"表示;数据1用"高电平0.56ms + 1.69ms = 2.25ms"表示。需要注意的是:当一体化接收头收到38kHz红外信号时,输出端输出低电平,否则为高电平。所以一体化接收头输出的波形和发射波形是反向的。
例程
使用定时器输入捕获功能实现了遥控器红外解码,解码后的键值和按键次数通过串口输出显示。
硬件说明
硬件资源:
- 串口UART1
- LED灯
- 红外遥控接收头
- NEC编码红外遥控器(需自备)
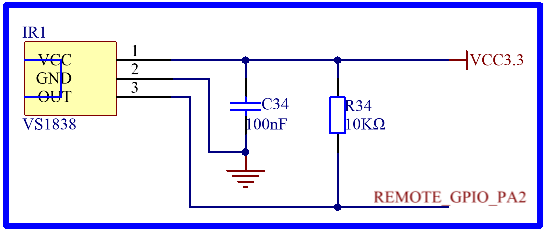
红外接收部分硬件电路,
软件说明
X-SOFT软件生态,X-API扩展文件如下。
ax_ir.c—— 红外接收源文件
ax_ir.h——红外接收头文件
红外码的解码通过定时器TIM9的通道CH1输入捕获事件实现,通过中断函数void TIM1_BRK_TIM9_IRQHandler()实现红外解码。
用户接口函数
| void AX_IR_Init(void); //红外遥控接口初始化 uint16_t AX_IR_ReadKeyStatus(void); //读取按键值和键次数 |
特殊说明,1.8固件 PLL_N 默认为360,实测解码错误,之前固件版本为336,改为336后,解码正常。
修改位置为,system_stm32f4xx.c,400行位置。
| #if defined (STM32F40_41xxx) #define PLL_N 336 //360 /* SYSCLK = PLL_VCO / PLL_P */ #define PLL_P 2 #endif /* STM32F40_41xxx */ |
使用定时器输入捕获功能实现了遥控器红外解码,解码后的键值和按键次数通过串口输出显示。
主程序代码如下。
| int main(void) { uint16_t a; uint8_t key,cnt;
//XRT1初始化 AX_Init(115200); printf("***X-CTR100 红外接收例程***\r\n\r\n"); printf("请对着红外接收头按遥控器\r\n");
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置系统中断优先级分组2
//红外接收初始化 AX_IR_Init();
while (1) { a = AX_IR_ReadKeyStatus();
key = a&0x00FF; // 取出键值 cnt = ((a&0x7F00)>>8); //取出按键次数
if(a) { if(a < 0x8000) //按键未抬起 { printf("Key = %X Count = %d \r\n", key, cnt ); } else { printf("Key = %X Count = %d END\r\n", key, cnt); } }
AX_Delayms(100); } } |
实现效果
遥控器对准红外接收头按键,显示键值和按键次数。
