本文中所有图片及其他引用均已获得原作者同意
向量
常规操作
struct Vector { double x, y; Vector(double x = 0, double y = 0) : x(x), y(y) {}; Vector operator + (const Vector &A) const { return Vector(x + A.x, y + A.y); }//向量的加法 Vector operator - (const Vector &A) const { return Vector(x - A.x, y - A.y); }//减法 Vector operator * (const double &A) const { return Vector(x * A, y * A); }//数乘 Vector operator / (const double &A) const { return Vector(x / A, y / A); }//数除 bool operator == (const Vector &A) const { return dcmp(x - A.x) == 0 && dcmp(y - A.y) == 0; }//相等 };
向量的极角
极角:这里指从$x$轴旋转到向量方向的弧度
double PolarAngle(Vector A) { return atan2(A.y, A.x); }//向量的极角
向量的旋转
若向量$(x, y)$旋转角度为$a$,则旋转后的向量为$(xcosa - ysina, y cosa + xsina)$
证明:
设旋转之前的向量的极角为$t$,半径为$r$
那么
$$x = rcost$$
$$y = rsint$$
旋转时候的向量为
$$x' = rcos(t + a) = r(costcosa - sintsina) = xcosa - ysina$$
$$y' = rsin(t + a) = r(sintcosa + costsina) = ycosa + xsina$$
Vector rotate(Vector &A, double a) { return A = Vector(A.x * cos(a) - A.y * sin(a), A.x * sin(a) + A.y * cos(a)); }//向量旋转,a为弧度
向量的点积
$a \cdot b = |a||b|cos<a,b>$
两向量的点积得到的是标量,即一个向量的模长乘另一个向量在该向量上正投影的数量
double Dot(Vector A, Vector B) { return A.x * B.x + A.y * B.y; }//两向量点积
向量的叉积
$a \times b = |a||b| sin<a,b>$
两向量叉积得到的是向量,在二维平面中得到的是三维空间中与这两个向量垂直的向量
在平面中,向量$v$和$w$的叉积等于$v$和$w$组成的三角形的有向面积的两倍
记$cross(v,w)$表示两向量的叉积,若$cross(v,w) > 0 $则说明$w$在$v$的左侧,否则$w$在$v$的右侧
double Cross(Vector A, Vector B) { return A.x * B.y - A.y * B.x; }//两向量叉积
计算三角形面积
直接利用叉积的定义
double Area(Point A, Point B, Point C) { return fabs(Cross(B - A, C - A) / 2); }//计算三角形的面积
计算向量的长度
直接利用点积的定义
double Length(Vector A) { return sqrt(Dot(A, A)); }//计算向量的长度
计算向量的夹角
同样直接利用点积的定义
double Angle(Vector A, Vector B) { return acos(Dot(A, B) / Length(A) / Length(B)); }//计算向量的夹角
线段
判断两直线的相对位置
判断$P_1P_0$与$P_1P_2$的相对位置关系,可以转化为判断$P_1P_0$与$P_2P_0$叉积的正负性
int Direction(Vector P1, Vector P2, Vector P0) { int opt = Cross(P1 - P0, P2 - P0); return dcmp(opt); }//判断P1-P0,P1-P2的相对位置关系,-1为逆时针,1为顺时针(P1P0顺时针旋转到P1P2),0为共线
判断两直线的交点
尼玛看不懂
Point GetLineIntersection(Point P, Vector V, Point Q, Vector W) { Vector u = P - Q; double t = Cross(W, u) / Cross(V, W); return P + V * t; }//判断两直线(P + tv,Q + tW)的交点(看不懂直接上y = kx + b吧)
计算点到直线的距离
利用叉积算出他们围城的平行四边形的面积,再除以底,高即为距离
double DistanceToLine(Point P, Point A, Point B) { Vector v1 = B - A, v2 = P - A; return fabs(Cross(v1, v2)) / Length(v1); }//计算点P到直线AB的距离(平行四边形面积 / 底)
计算点到线段的距离
这个要分三种情况讨论
double DistanceToSegment(Point P, Point A, Point B) { if(A == B) return Length(P - A); if(dcmp(Dot(P - A, B - A)) < 0) return Length(P - A); if(dcmp(Dot(P - B, A - B)) < 0) return Length(P - B); return DistanceToLine(P, A, B); }//计算点P到线段AB的距离
多边形
计算多边形的有向面积
将$n$边形拆成三角形
double PolygonAread(Point *P, int N) { double area = 0; for(int i = 1; i <= N - 1; i++) area += Cross(P[i] - P[0], P[i + 1] - P[0]); return area / 2; }//计算多边形的有向面积
判断点是否在多边形内部
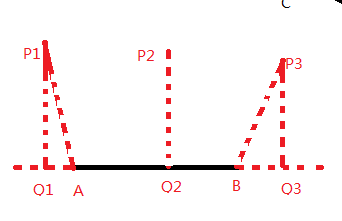
基本思想:从点$P$向右做一条射线,判断从无限远处到点$P$,射线穿过了几条边
有两种需要特判的情况
1.射线与某条边重合,该边不统计入答案
2.射线与端点重合
此时,我们钦定边是由编号小的连向编号大的
若边从上到下穿过了射线,包含终点不包含起点
若边从下到上穿过了射线,包含起点不包含重点
int isPointInPolygon(Point P, Point Poly[], int N) { int wn = 0, k, d1, d2; for(int i = 0; i < N; i++) { if(!dcmp(DistanceToSegment(P, Poly[i], Poly[(i + 1) % N]))) return -1; //点在线段的边界上 k = dcmp(Cross(Poly[(i + 1) % N] - Poly[i], P - Poly[i])); d1 = dcmp(Poly[i].y - P.y); d2 = dcmp(Poly[(i + 1) % N].y - P.y); if(k > 0 && d1 <= 0 && d2 > 0) wn++;//点在左,下上穿 if(k > 0 && d2 <= 0 && d1 > 0) wn++;//点在右,上下穿 return wn & 1; // 1:内 2:外 } }//判断点是否在多边形内部
对踵点
定义:若点对$(a, b)$均为多边形上的点且存在过$a$点的切线与过$b$点的切线平行,则成$(a, b)$为多边形上的对踵点
计算方法:
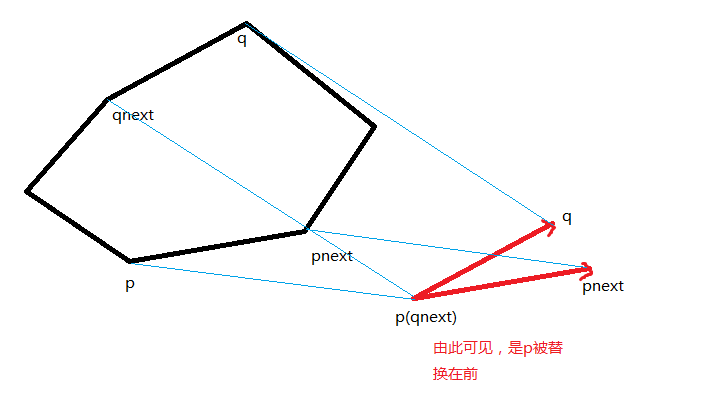
设$p_{ymin}$表示$y$最小的点,$q_{ymax}$表示$y$最大的点,显然它们是一对对踵点

接下来以相同的角速度逆时针旋转两条射线,当其中的一条穿过多边形的下一个端点$p_{next}$时,用$p_{next}$作为新的端点,同时与$q_{pre}$构成新的对踵点。
在这个算法中,我们快速的找出两条射线究竟是哪条先穿过下一个端点,我们可以用叉积来优化这一过程。
求凸多边形的直径
定义:凸多边形的直径为多边形的上最远的点对的距离
很显然,直径一定是在对踵点处取得,直接枚举对踵点即可
double RotatingCaliper_diameter(Point Poly[], int N) { int p = 0, q = N - 1, fl; double ret = 0; for(int i = 0; i < N; i++) { if(Poly[i].y > Poly[q].y) q = i; if(Poly[i].y < Poly[p].y) p = i; } for(int i = 0; i < N * 3; i++) { ret = max(ret, Length(Poly[p % N] - Poly[q % N])); fl = dcmp(Cross(Poly[(p + 1) % N] - Poly[p % N], Poly[q % N] - Poly[(q + 1) % N])); if(!fl) { ret = max(ret, Length(Poly[p % N] - Poly[(q + 1) % N])); ret = max(ret, Length(Poly[q % N] - Poly[(p + 1) % N])); p++, q++; } else { if(fl > 0) p++; else q++; } } }//计算多边形直径
凸多边形的宽度
凸多边形最小面积外接矩形
凸包-Andrew算法
首先按照$x$为第一关键字,$y$为第二关键字从小到大排序,并删除重复的点
用栈维护凸包内的点
1、把$p_1, p_2$放入栈中
2、若$p_i{i > 3}$在直线$$
要做的题
POJ 2187 凸多边形直径
#include<cstdio> #include<cmath> using namespace std; const int eps = 1e-10; int dcmp(double x) { if(fabs(x) < eps) return 0; return x < 0 ? -1 : 1; } #define Point Vector struct Vector { double x, y; Vector(double x = 0, double y = 0) : x(x), y(y) {}; Vector operator + (const Vector &A) const { return Vector(x + A.x, y + A.y); }//向量的加法 Vector operator - (const Vector &A) const { return Vector(x - A.x, y - A.y); }//减法 Vector operator * (const double &A) const { return Vector(x * A, y * A); }//数乘 Vector operator / (const double &A) const { return Vector(x / A, y / A); }//数除 bool operator == (const Vector &A) const { return dcmp(x - A.x) == 0 && dcmp(y - A.y) == 0; }//相等 }; double PolarAngle(Vector A) { return atan2(A.y, A.x); }//向量的极角 Vector rotate(Vector &A, double a) { return A = Vector(A.x * cos(a) - A.y * sin(a), A.x * sin(a) + A.y * cos(a)); }//向量旋转,a为弧度 double Dot(Vector A, Vector B) { return A.x * B.x + A.y * B.y; }//两向量点积 double Cross(Vector A, Vector B) { return A.x * B.y - A.y * B.x; }//两向量叉积 double Area(Point A, Point B, Point C) { return fabs(Cross(B - A, C - A) / 2); }//计算三角形的面积 double Length(Vector A) { return sqrt(Dot(A, A)); }//计算向量的长度 double Angle(Vector A, Vector B) { return acos(Dot(A, B) / Length(A) / Length(B)); }//计算向量的夹角 int Direction(Vector P1, Vector P2, Vector P0) { int opt = Cross(P1 - P0, P2 - P0); return dcmp(opt); }//判断P1-P0,P1-P2的相对位置关系,-1为逆时针,1为顺时针(P1P0顺时针旋转到P1P2),0为共线 Point GetLineIntersection(Point P, Vector V, Point Q, Vector W) { Vector u = P - Q; double t = Cross(W, u) / Cross(V, W); return P + V * t; }//判断两直线(P + tv,Q + tW)的交点(看不懂直接上y = kx + b吧) double DistanceToLine(Point P, Point A, Point B) { Vector v1 = B - A, v2 = P - A; return fabs(Cross(v1, v2)) / Length(v1); }//计算点P到直线AB的距离(平行四边形面积 / 底) double DistanceToSegment(Point P, Point A, Point B) { if(A == B) return Length(P - A); if(dcmp(Dot(P - A, B - A)) < 0) return Length(P - A); if(dcmp(Dot(P - B, A - B)) < 0) return Length(P - B); return DistanceToLine(P, A, B); }//计算点P到线段AB的距离 double PolygonAread(Point *P, int N) { double area = 0; for(int i = 1; i <= N - 1; i++) area += Cross(P[i] - P[0], P[i + 1] - P[0]); return area / 2; }//计算多边形的有向面积 int isPointInPolygon(Point P, Point Poly[], int N) { int wn = 0, k, d1, d2; for(int i = 0; i < N; i++) { if(!dcmp(DistanceToSegment(P, Poly[i], Poly[(i + 1) % N]))) return -1; //点在线段的边界上 k = dcmp(Cross(Poly[(i + 1) % N] - Poly[i], P - Poly[i])); d1 = dcmp(Poly[i].y - P.y); d2 = dcmp(Poly[(i + 1) % N].y - P.y); if(k > 0 && d1 <= 0 && d2 > 0) wn++;//点在左,下上穿 if(k > 0 && d2 <= 0 && d1 > 0) wn++;//点在右,上下穿 return wn & 1; // 1:内 2:外 } }//判断点是否在多边形内部 int main() { return 0; }