版权声明:本文为博主原创文章,未经博主允许不得转载。 https://blog.csdn.net/u010128736/article/details/53121912
通过基础矩阵和本质矩阵恢复摄像机矩阵
本人邮箱:[email protected],欢迎交流讨论,
欢迎转载,转载请注明网址http://blog.csdn.net/u010128736/
一、通过基础矩阵恢复摄像机矩阵
(1)基础矩阵的多义性
根据之前博客对基础矩阵的讲解,基础矩阵F可以由两个摄像机矩阵P和P’表示,即
若H表示3维射影变换的4×4矩阵,对两个摄像机矩阵进行射影变换,变作
新的对极线可以表示为
最后,新的基础矩阵可以推导得到其等于原基础矩阵F:
因此,由摄像机矩阵对(P,P’)唯一确定一个基础矩阵F,但反过来由基础矩阵F,不能唯一得到一对摄像机矩阵对,结果相差一个右乘3D射影变换。即在相差一个射影变换的意义下摄像机矩阵可以由基本矩阵确定。
(2)摄像机矩阵的规范形式
由于上述的多义性,对于给定基础矩阵定义摄像机矩阵对,规定一种特殊的规范形式,即规定第一个摄像机矩阵取[I|0]。则对于P=[I|0]和P’=[M|m],基础矩阵为:
对于基础矩阵F,我们能得到下列特征:
★ 一个非零矩阵F是对应于一对摄像机矩阵P和P’的基本矩阵的充要条件是
所以对应于基本矩阵F,一对规范形式的摄像机矩阵的一般公式是:
其中v是任何3维矢量,λ是一个正标量。
根据Luong和Vieville曾建议,基础矩阵F对应的摄像机矩阵可以取为:
二、通过本质矩阵恢复摄像机矩阵
(1)本质矩阵
本质矩阵是归一化图像坐标下的基础矩阵的特殊形式。对于P=K[R|t]的摄像机矩阵,x=PX为图像上的一点。归一化坐标为:
摄像机矩阵
由
(2)本质矩阵的性质
本质矩阵E有5个自由度,是一个齐次矩阵。一个3×3矩阵是本质矩阵的充要条件是它的奇异值中有两个相等,而第三个是0。
其中S是反对称矩阵。我们定义正交矩阵W和反对称矩阵Z如下所示:
则S可以记做
(3)由本质矩阵恢复摄像机矩阵
将E进行SVD分解为
如图所示,这四个解的几何意义表示如下:
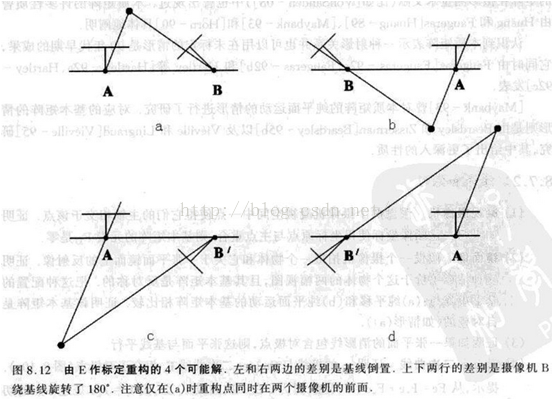
可以看到,只有图a中的重构点在两个摄像机的前面,满足真实情况。所以可以用一个点进行测试,来选择正确的摄像机矩阵P’。