文章目录
一、介绍
1、概念
kinodynamic规划问题是综合机器人的运动,同时受到运动学约束(如避开障碍物)和动力学约束(如速度、加速度和力的模量边界)。它的解是从时间到广义力或加速度的映射。传统的路径规划包括前端的路径搜索和后端的轨迹优化两部分。
**目的:**之所以要在前端考虑动力学约束,是为了减轻后端优化的负担,kinodynamic planning是从粗到精的过程;轨迹仅局部优化;不可行路径对非完整系统毫无意义;
2、车辆模型
(1)单车模型
(2)差速驱动模型

http://planning.cs.uiuc.edu/node659.html
(3)Simple car mode / Reeds & Shepp’s car / Dubin’s car

http://planning.cs.uiuc.edu/node658.html
二、 State Lattice Planner
状态栅格规划器(State Lattice Planner)是一种基于采样的满足动力学约束的路径规划算法。
1、基本思想
A*、RRT等算法可以建立一个用于路径搜索的图模型,得到搜索树用于解决路径规划问题。但得到的图模型对真实机器人系统未必可行。因此我们需要在图的节点之间建立可行的运动连接。s =f(s,u),其中s为状态变量,u 为控制变量:
(1)两种方法:
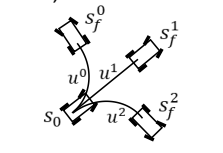
正向:基于控制空间的采样;
前向模拟;固定控制量和一个时间间隔T;没有任务导向;容易实现;低规划效率;
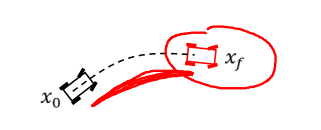
反向:基于状态空间的采样。
给定了被控对象的初始状态和目标状态;反向计算u和T;好的任务导向,实现困难;规划效率高;需要对两点的边界值问题进行求解;
2、边界值问题(Boundary Value Problem, BVP)
参考:
https://blog.csdn.net/space_dandy/article/details/114396542
三、 Kinodynamic RRT*

参考:
https://blog.csdn.net/qq_37087723/article/details/113846316
四、 Hybrid A*
1、基本思想:
保证一个网格里只有一个节点。

2、启发函数设计:
(1)2维的欧式距离
(2)不考虑障碍物的非完整式(满足动力学约束)
(3)不考虑障碍物的非完整式(满足动力学约束)+ 忽略了汽车的非完整性,考虑障碍物。
3、Analytic Expansions
基于控制空间采样(离散化)效率较低,因为没有对目标偏差进行编码。我们手动添加(尝试)状态空间采样。

搜索树直接搜索出一条到终点状态的最优路径。(理论上最短,检查满足动力学约束等因素)如:设置概率N=20,扩展20个节点one shot一次。tirck: 距离越近,N越小。
参考链接:
与A*区别:https://blog.csdn.net/qq_31815513/article/details/88709640
论文解读:https://blog.csdn.net/qq_41871826/article/details/107431021
代码实现:https://github.com/teddyluo/hybrid-a-star-annotation
相关文献:https://blog.csdn.net/luohuiwu/article/details/103181609/
推荐课程:深蓝学院移动机器人运动规划学习课程
内容皆来源于网络和参考链接整理,侵权联系删。