目录
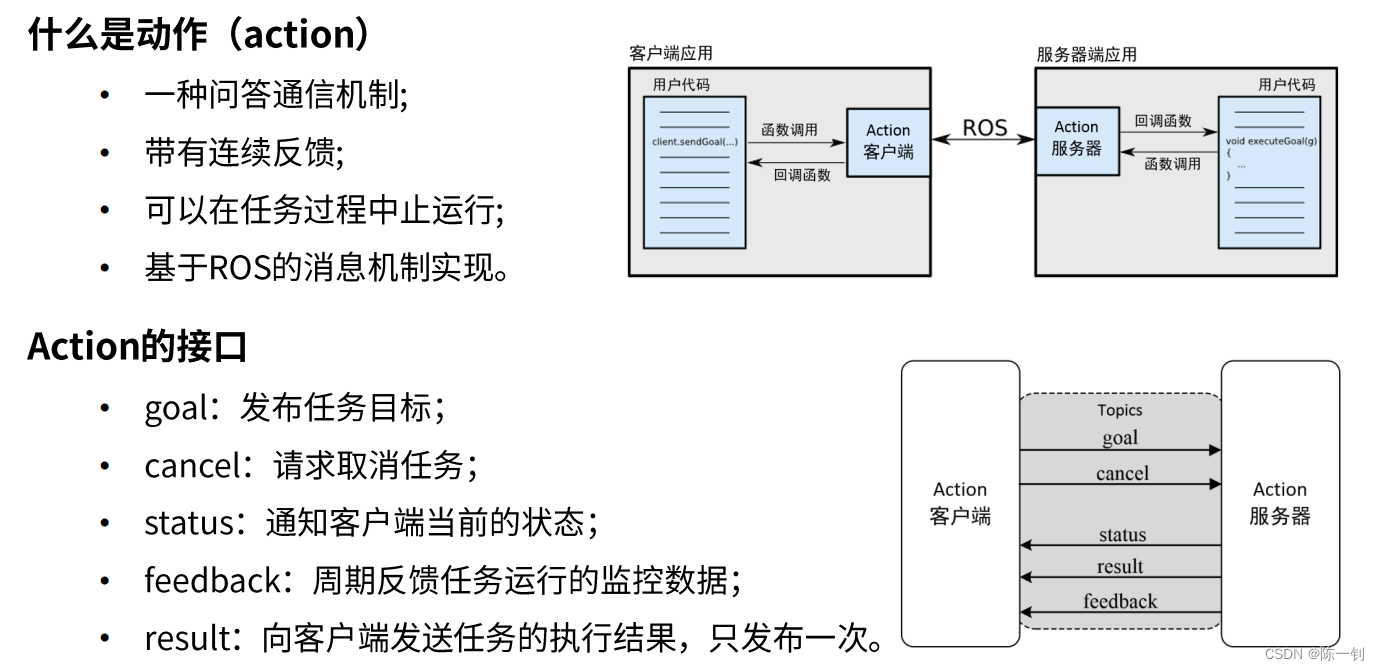
一、什么是动作通讯模型
二、创建工作区间
1、创建功能包
mkdir -p ~/catkin_ws/src
cd catkin_ws/src/
catkin_create_pkg learn_action std_msgs rospy roscpp
2、编译功能包
cd ~/catkin_ws
catkin_make
source ~/catkin_ws/devel/setup.bash
三、动作编程
1、定义action文件
在learn_action文件下创建action文件
在action文件下创建TurtleMove.action文件,并在TurtleMove.action文件内输入代码:
# Define the goal
float64 turtle_target_x
# Specify Turtle's target position
float64 turtle_target_y
float64 turtle_target_theta
---
# Define the result
float64 turtle_final_x
float64 turtle_final_y
float64 turtle_final_theta
---
# Define a feedback message
float64 present_turtle_x
float64 present_turtle_y
float64 present_turtle_theta
2、创建.cpp文件
在learn_action的src文件夹下,创建TurtleMove_server.cpp文件和TurtleMove_client.cpp文件
1)TurtleMove_server.cpp文件
/* 此程序通过通过动作编程实现由client发布一个目标位置 然后控制Turtle运动到目标位置的过程 */
#include <ros/ros.h> #include <actionlib/server/simple_action_server.h>
#include "learn_action/TurtleMoveAction.h"
#include <turtlesim/Pose.h>
#include <turtlesim/Spawn.h>
#include <geometry_msgs/Twist.h>
typedef actionlib::SimpleActionServer<learn_action::TurtleMoveAction> Server;
struct Myturtle
{
float x;
float y;
float theta;
}turtle_original_pose,turtle_target_pose;
ros::Publisher turtle_vel;
void posecallback(const turtlesim::PoseConstPtr& msg)
{
ROS_INFO("Turtle1_position:(%f,%f,%f)",msg->x,msg->y,msg->theta);
turtle_original_pose.x=msg->x;
turtle_original_pose.y=msg->y;
turtle_original_pose.theta=msg->theta;
}
// 收到action的goal后调用该回调函数
void execute(const learn_action::TurtleMoveGoalConstPtr& goal, Server* as)
{
learn_action::TurtleMoveFeedback feedback;
ROS_INFO("TurtleMove is working.");
turtle_target_pose.x=goal->turtle_target_x;
turtle_target_pose.y=goal->turtle_target_y;
turtle_target_pose.theta=goal->turtle_target_theta;
geometry_msgs::Twist vel_msgs;
float break_flag;
while(1)
{
ros::Rate r(10);
vel_msgs.angular.z = 4.0 * (atan2(turtle_target_pose.y-turtle_original_pose.y, turtle_target_pose.x-turtle_original_pose.x)-turtle_original_pose.theta);
vel_msgs.linear.x = 0.5 * sqrt(pow(turtle_target_pose.x-turtle_original_pose.x, 2) + pow(turtle_target_pose.y-turtle_original_pose.y, 2));
break_flag=sqrt(pow(turtle_target_pose.x-turtle_original_pose.x, 2) + pow(turtle_target_pose.y-turtle_original_pose.y, 2));
turtle_vel.publish(vel_msgs);
feedback.present_turtle_x=turtle_original_pose.x;
feedback.present_turtle_y=turtle_original_pose.y;
feedback.present_turtle_theta=turtle_original_pose.theta;
as->publishFeedback(feedback);
ROS_INFO("break_flag=%f",break_flag); if(break_flag<0.1) break; r.sleep(); } // 当action完成后,向客户端返回结果 ROS_INFO("TurtleMove is finished.");
as->setSucceeded();
}
int main(int argc, char** argv)
{
ros::init(argc, argv, "TurtleMove_server");
ros::NodeHandle n,turtle_node;
ros::Subscriber sub =turtle_node.subscribe("turtle1/pose",10,&posecallback);//订阅小乌龟的位置信息
turtle_vel = turtle_node.advertise<geometry_msgs::Twist>("turtle1/cmd_vel",10);//发布控制小乌龟运动的速度
// 定义一个服务器
Server server(n, "TurtleMove", boost::bind(&execute, _1, &server), false);
// 服务器开始运行
server.start();
ROS_INFO("server has started.");
ros::spin();
return 0;
}
2)TurtleMove_client.cpp文件
#include <actionlib/client/simple_action_client.h>
#include "learn_action/TurtleMoveAction.h"
#include <turtlesim/Pose.h>
#include <turtlesim/Spawn.h>
#include <geometry_msgs/Twist.h>
typedef actionlib::SimpleActionClient<learn_action::TurtleMoveAction> Client;
struct Myturtle
{
float x;
float y;
float theta;
}turtle_present_pose;
// 当action完成后会调用该回调函数一次
void doneCb(const actionlib::SimpleClientGoalState& state, const learn_action::TurtleMoveResultConstPtr& result)
{
ROS_INFO("Yay! The TurtleMove is finished!");
ros::shutdown();
}
// 当action激活后会调用该回调函数一次
void activeCb()
{
ROS_INFO("Goal just went active");
}
// 收到feedback后调用该回调函数
void feedbackCb(const learn_action::TurtleMoveFeedbackConstPtr& feedback)
{
ROS_INFO(" present_pose : %f %f %f", feedback->present_turtle_x, feedback->present_turtle_y,feedback->present_turtle_theta);
}
int main(int argc, char** argv)
{
ros::init(argc, argv, "TurtleMove_client");
// 定义一个客户端
Client client("TurtleMove", true);
// 等待服务器端
ROS_INFO("Waiting for action server to start.");
client.waitForServer();
ROS_INFO("Action server started, sending goal.");
// 创建一个action的goal
learn_action::TurtleMoveGoal goal;
goal.turtle_target_x = 1;
goal.turtle_target_y = 1;
goal.turtle_target_theta = 0;
// 发送action的goal给服务器端,并且设置回调函数
client.sendGoal(goal, &doneCb, &activeCb, &feedbackCb);
ros::spin();
return 0;
}
3)修改package.xml文件如图
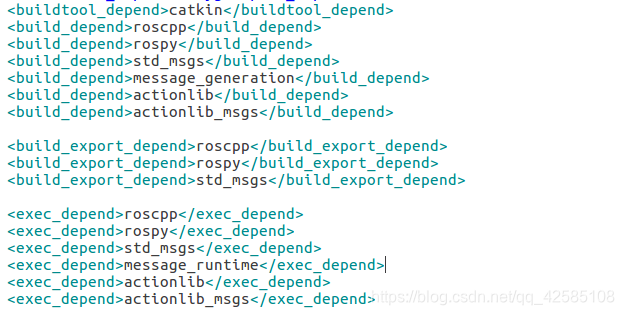
<build_depend>message_generation</build_depend>
<build_depend>actionlib</build_depend>
<build_depend>actionlib_msgs</build_depend>
<exec_depend>message_runtime</exec_depend>
<exec_depend>actionlib</exec_depend>
<exec_depend>actionlib_msgs</exec_depend>
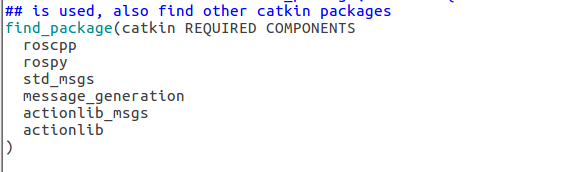
4)修改 ~/catkin_ws/src/learn_action/CMakeLists.txt
按如下图片作修改:
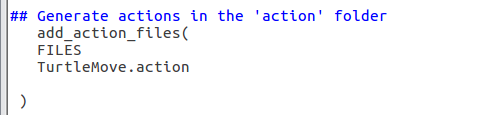

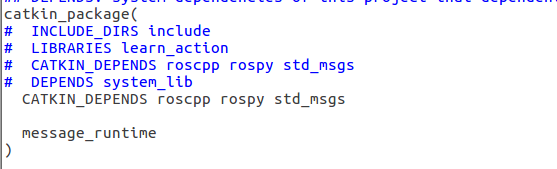

最后在末尾添加:
代码如下:
add_executable(TurtleMove_client src/TurtleMove_client.cpp)
target_link_libraries(TurtleMove_client ${
catkin_LIBRARIES})
add_dependencies(TurtleMove_client ${
PROJECT_NAME}_gencpp)
add_executable(TurtleMove_server src/TurtleMove_server.cpp)
target_link_libraries(TurtleMove_server ${
catkin_LIBRARIES})
add_dependencies(TurtleMove_server ${
PROJECT_NAME}_gencpp)
3、编译及运行
编译过程如图:
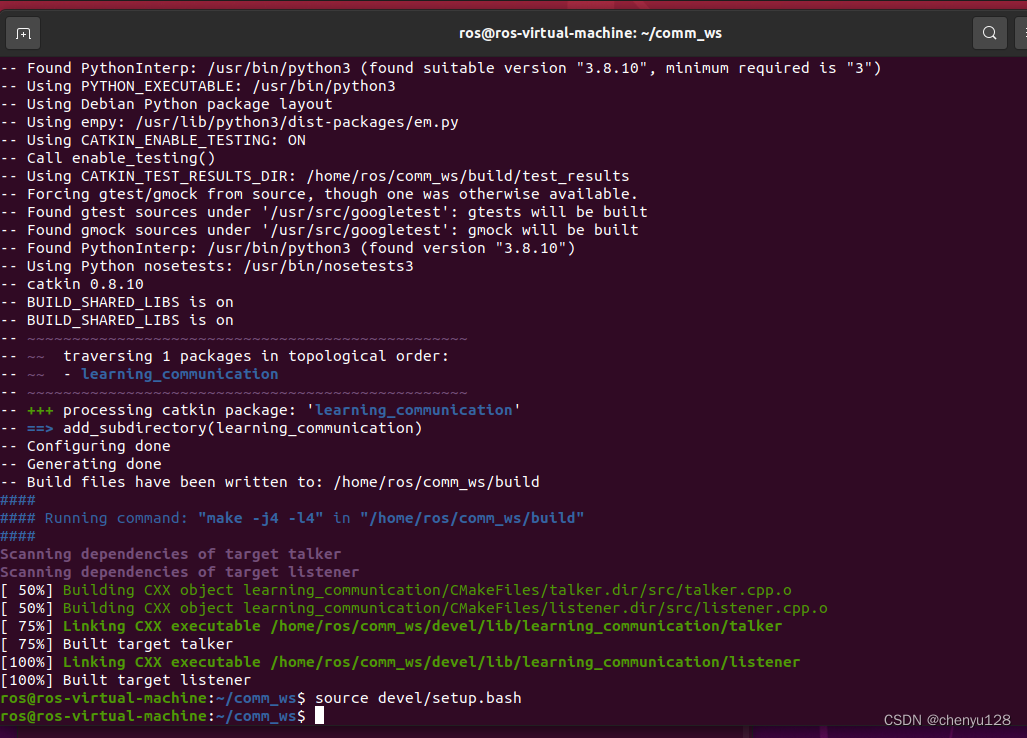
设置环境变量:
source ~/catkin_ws/devel/setup.bash
然后开始运行小海龟:
roscore
source ~/catkin_ws/devel/setup.bash
rosrun turtlesim turtlesim_node
source ~/catkin_ws/devel/setup.bash
rosrun learn_action TurtleMove_server
source ~/catkin_ws/devel/setup.bash
rosrun learn_action TurtleMove_client
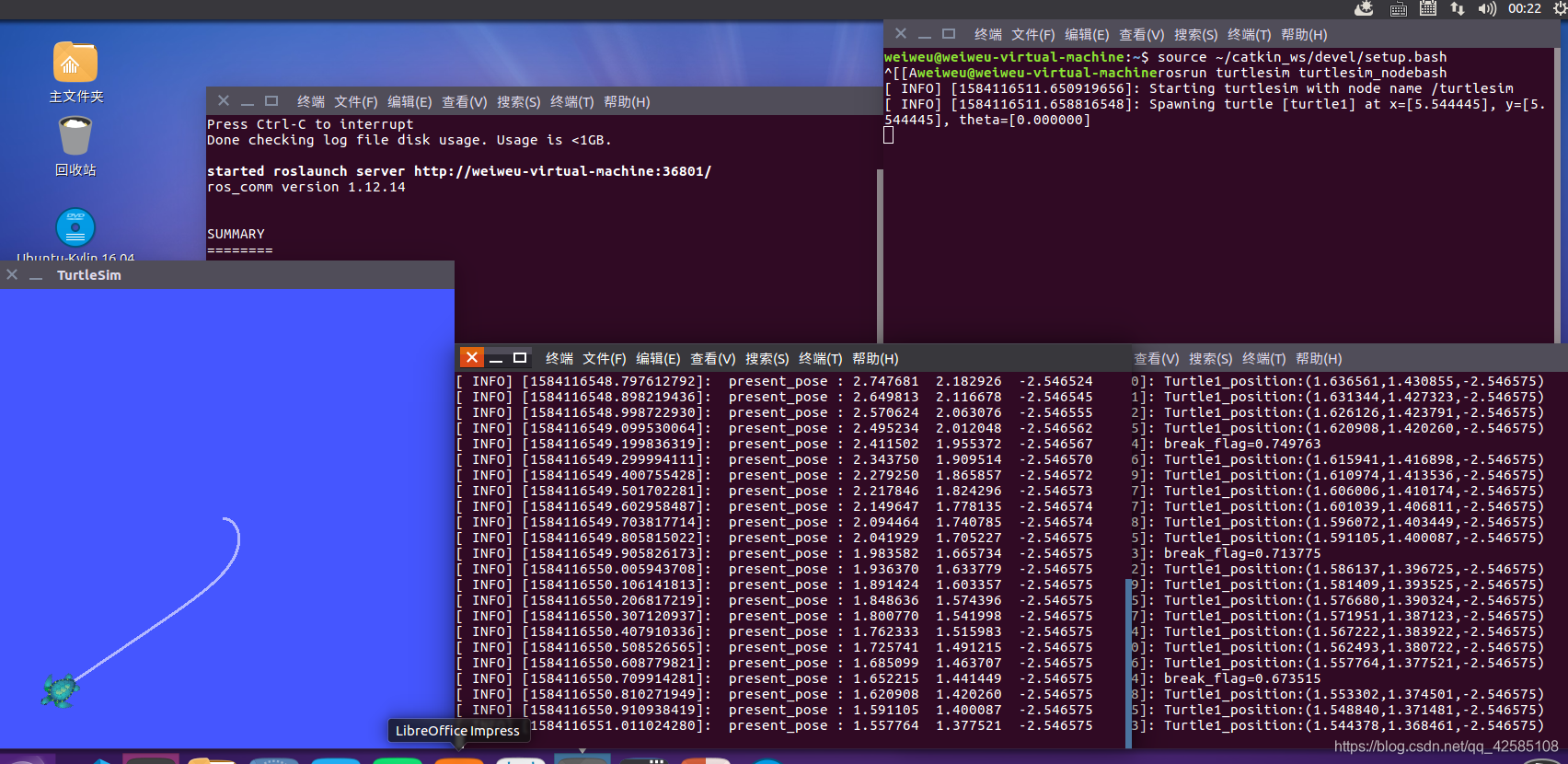
最好如图所示,小海龟成功运行:
四、分布式通讯
在两台电脑上演示ROS的分布式通信
1、主机
两台电脑保证在一个局域网内,输入命令查看主机ip
ifconfig
开启ros
roscore
新建终端
export ROS_IP=xxx.xxx.xxx #本机IP
export ROS_MASTER_URI=http://xxx.xxx.xxx:11311/ #主机IP
rosrun turtlesim turtlesim_node
source ~/.bashrc
2、从机
开启一个终端,输入
export ROS_IP=X.X.X.X #本机ip
export ROS_MASTER_URI=http://x.x.x.x:11311 #主机IP
source ~/.bashrc
rosrun turtlesim turtle_teleop_key
3、运行结果
这里我没有两台电脑,就用了一台电脑上同时打开两台虚拟机做测试。
结果可以成功运行,在一台虚拟机上使用方向键操控另一台虚拟机上打开的小乌龟运行程序。
五、总结
动作编程是一种问答通讯机制,带有连续反馈,可以在任务过程中止运行。此次实验任务学习到的东西很多,需要话很多时间去学习消化,在前辈细致的博客指导下还是比较容易完成的。
六、参考资料
https://blog.csdn.net/qq_42585108/article/details/104852100