会哭的孩子有奶喝!之前是使用2800元的rplidar A2,哭完后买了2w多的HOKUYO,思岚科技的A2性价比很高,只是部分场景需要远距离的激光雷达。
ROS介绍:https://www.roscomponents.com/en/lidar-laser-scanner/86-ust-20lx.html
http://wiki.ros.org/hokuyo_node/Tutorials
1、下载ros驱动到workspace下:
git clone https://github.com/ros-drivers/urg_node或者使用apt安装:
sudo apt-get install ros-kinetic-urg-node2、安装一些依赖:
sudo apt-get install ros-kinetic-urg-csudo apt-get install ros-kinetic-laser-proc
编辑/etc/network/interfaces,添加一个静态的IP地址
sudo gedit /etc/network/interfaces
auto lo
iface lo inet loopback
auto eth0
allow-hotplug eth0
iface eth0 inet static
address 192.168.0.1
netmask 255.255.255.0 4、接上网口,ping 192.168.0.10 是可以ping通了。执行以下指令运行:
rosrun urg_node urg_node _ip_address:="192.168.0.10"5、用rviz可以验证是否成功了。
rosrun rviz rviz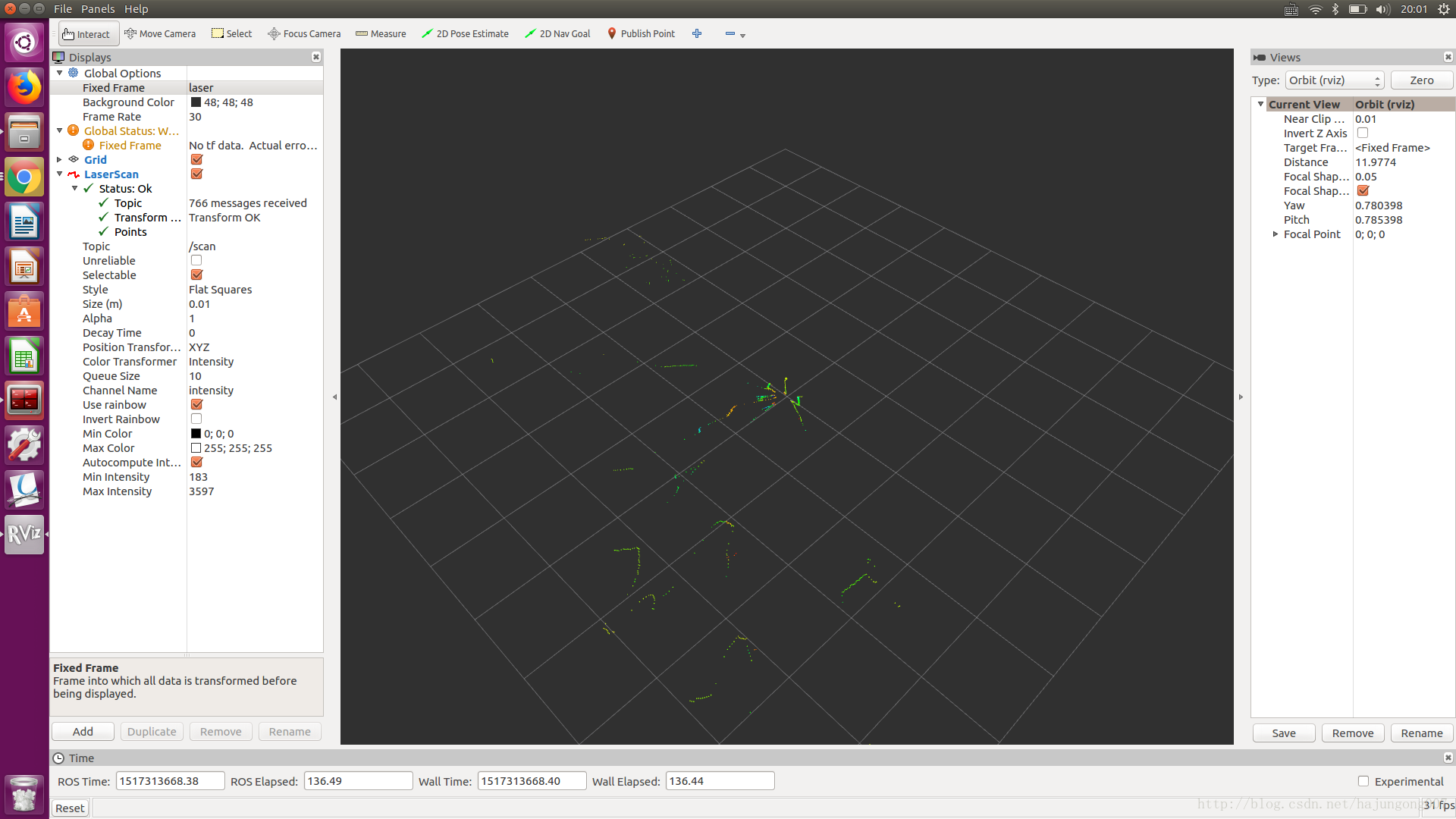
结束语:这只是在PC机上调通,下一步我要将其安装在树莓派上,电源用turtlebot的12v1.5A接口供电,算法用cartography,希望对你有用。
补充:昨天晚上在PC机上调通,今天在树莓派上也弄好了,用cartography算法跑通了,点云挺密集的,明天去大型仓库里面建图。
参考:
http://blog.csdn.net/u013341645/article/details/54896133?utm_source=itdadao&utm_medium=referral
http://blog.csdn.net/hebbely/article/details/78623711
http://blog.csdn.net/u013341645/article/details/54896133
http://blog.csdn.net/gauxonz/article/details/53106212