ROS与C++入门教程-搭建开发环境(QT+ros_qtc_plugin)
ros_qtc_plugin插件新建项目
- 利用插件不仅可以新建工作空间还可以导入现有的工作空间,而“新建文件”中的“ROS”下面的“Package”、“Basic Node”等选项可以创建package和和节点、launch文件、urdf文件等
(1)新建项目:
-
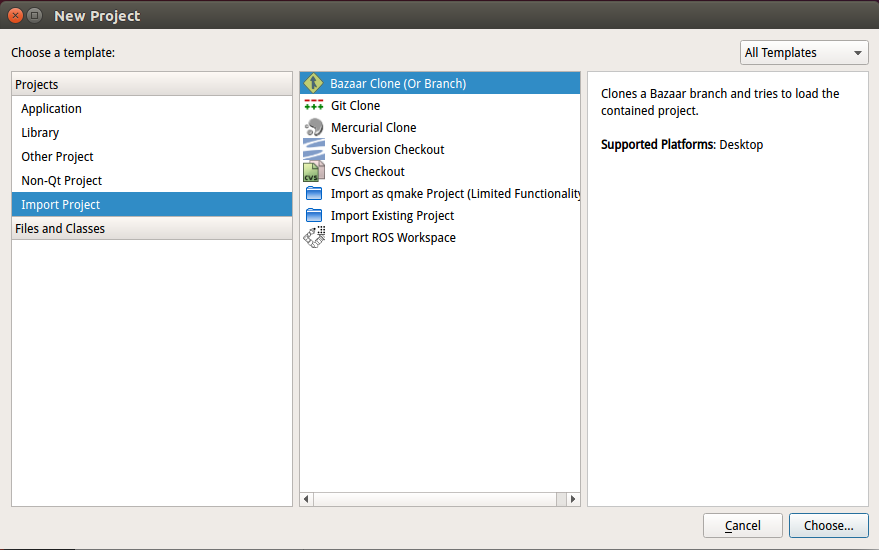
“文件”——“新建文件或项目”,选择”Import ROS Workspace”——“choose”
-
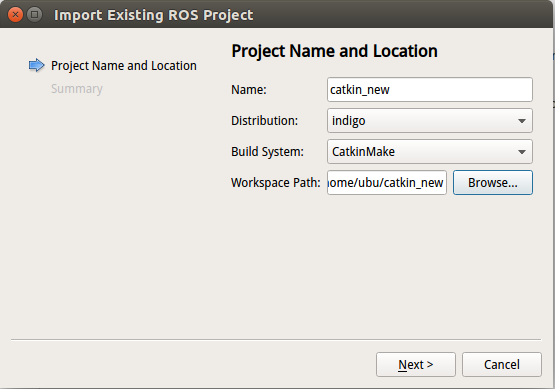
然后填写catkin工作空间的名字和位置
-
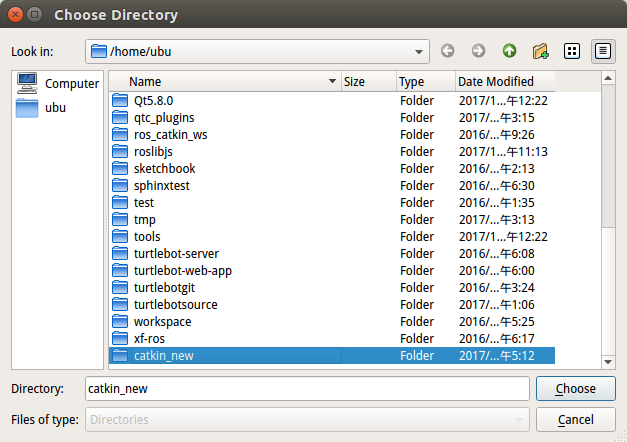
选择“浏览”——“创建文件夹”,创建一个名为catkin_new的文件夹,如下图,按回车,再选择“打开”
-
在“项目管理”步骤可以配置版本控制系统,我们选择“完成”,如下图
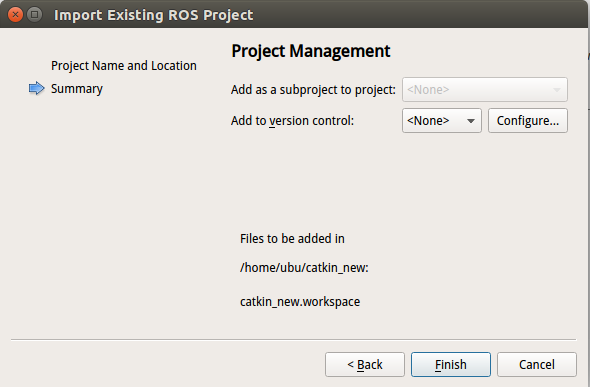
-
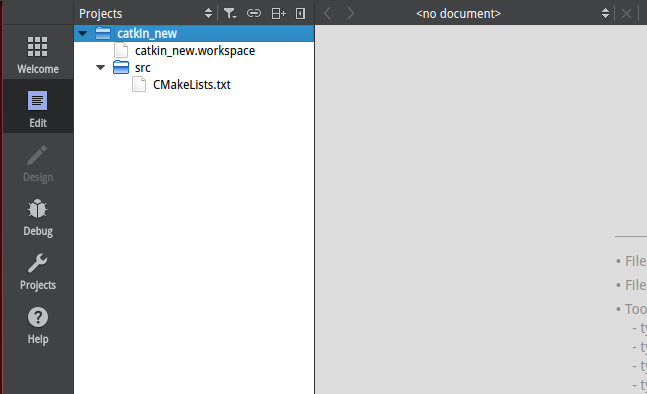
建好的工作空间,如果没出现src目录,可以关闭,重开即可。
(2)创建package
-
在catkin_new下面的src上右键单击,选择“添加新文件”,如下图
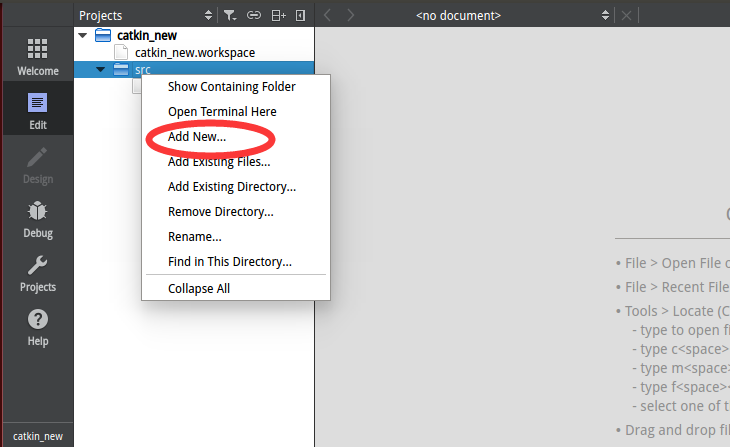
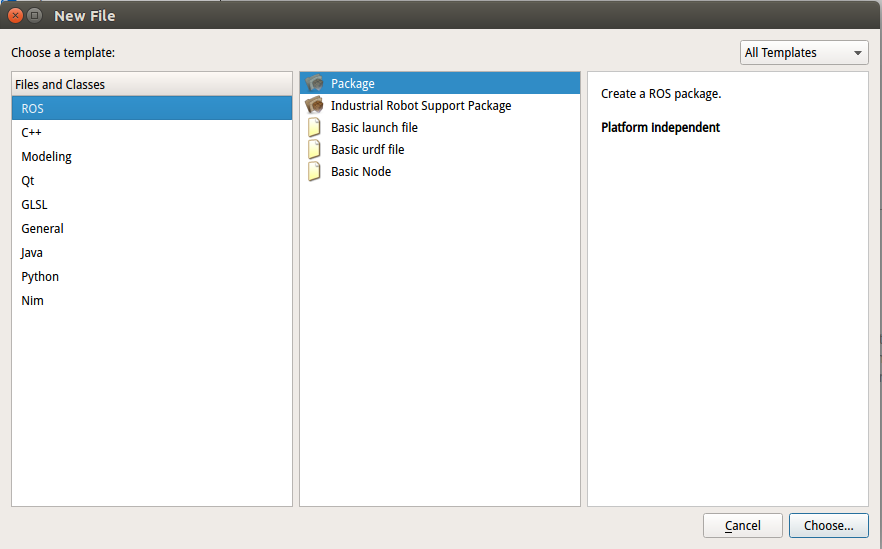
-
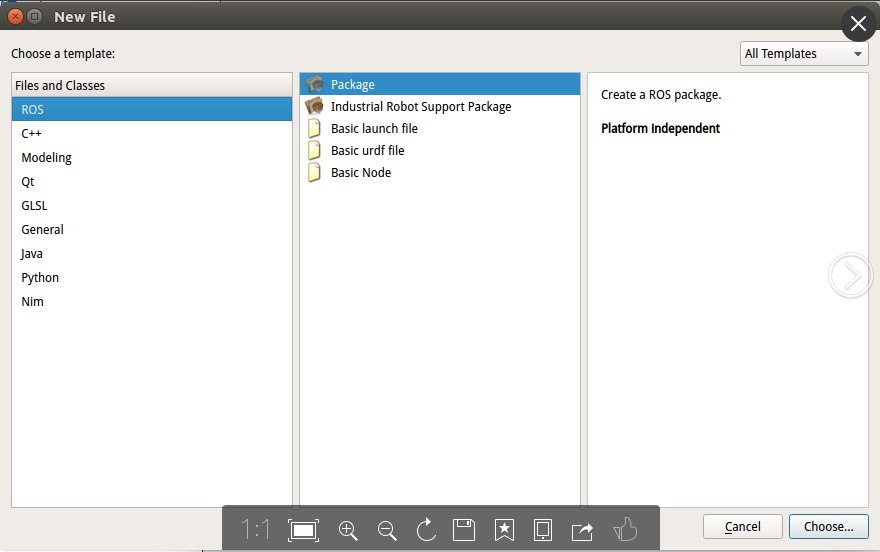
然后选择“ROS”——“package”——“choose”
-
填写package的名字,如test1
-
填写作者(Authors)和维护者(Maintainers),如果你的Qt环境部没有配置中文支持请不要用中文,否则无法新建package
-
或者新建的package里面的package.xml会是空文件
-
在“Dependencies”下的“Catkin”一栏填写依赖,通常用C++写节点需要添加对roscpp的依赖
-
如下图
-
下一步,再点击完成
(3)添加新的节点
-
test1的src文件夹上右键单击,选择“添加新文件”
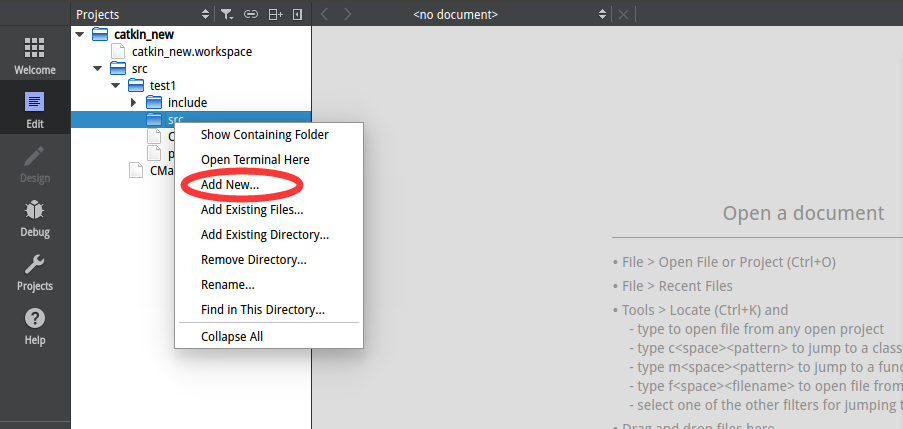
-
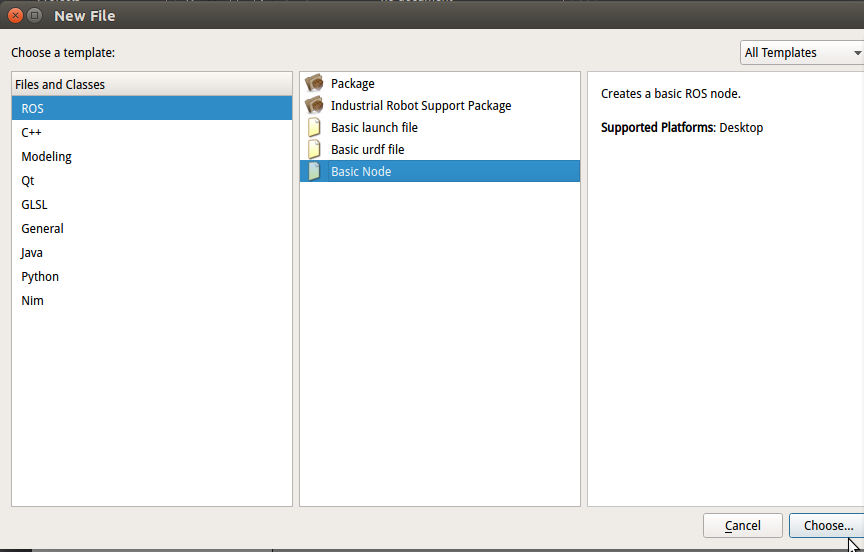
选择“ROS”——“Basic Node”——“choose”,创建一个节点,也就是新建一个.cpp文件
-
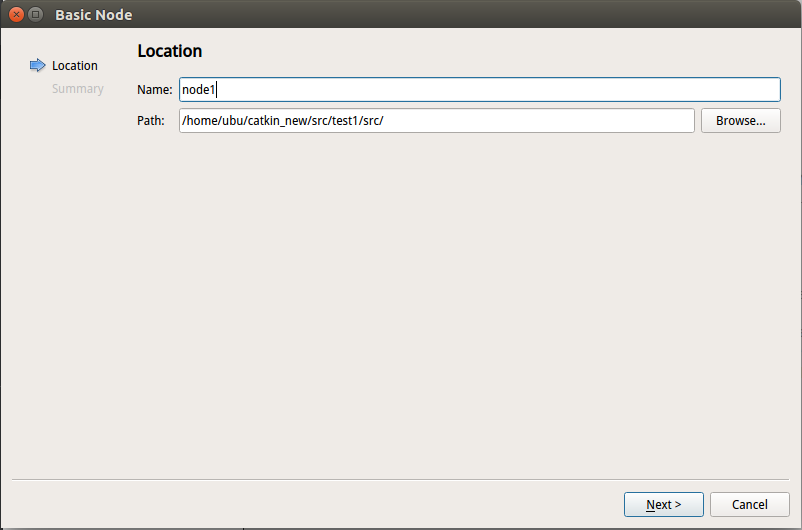
节点名称写为“node1”,则生成一个名为node1.cpp的源文件
-
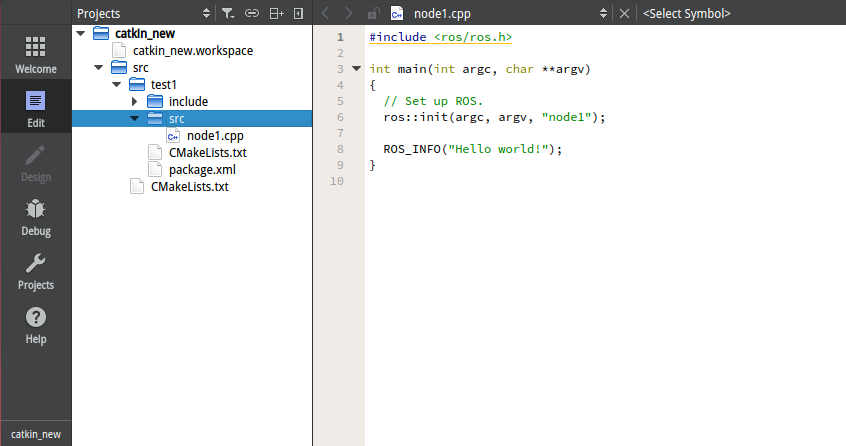
用ROS模板新建的node1.cpp的源文件如下图,是自动生成的一个Hello World程序
-
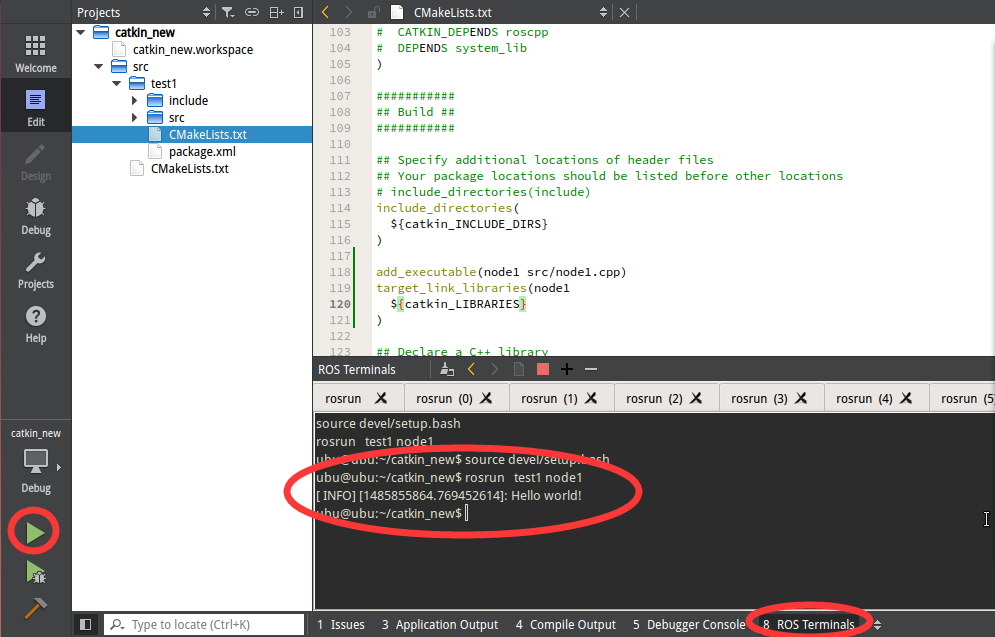
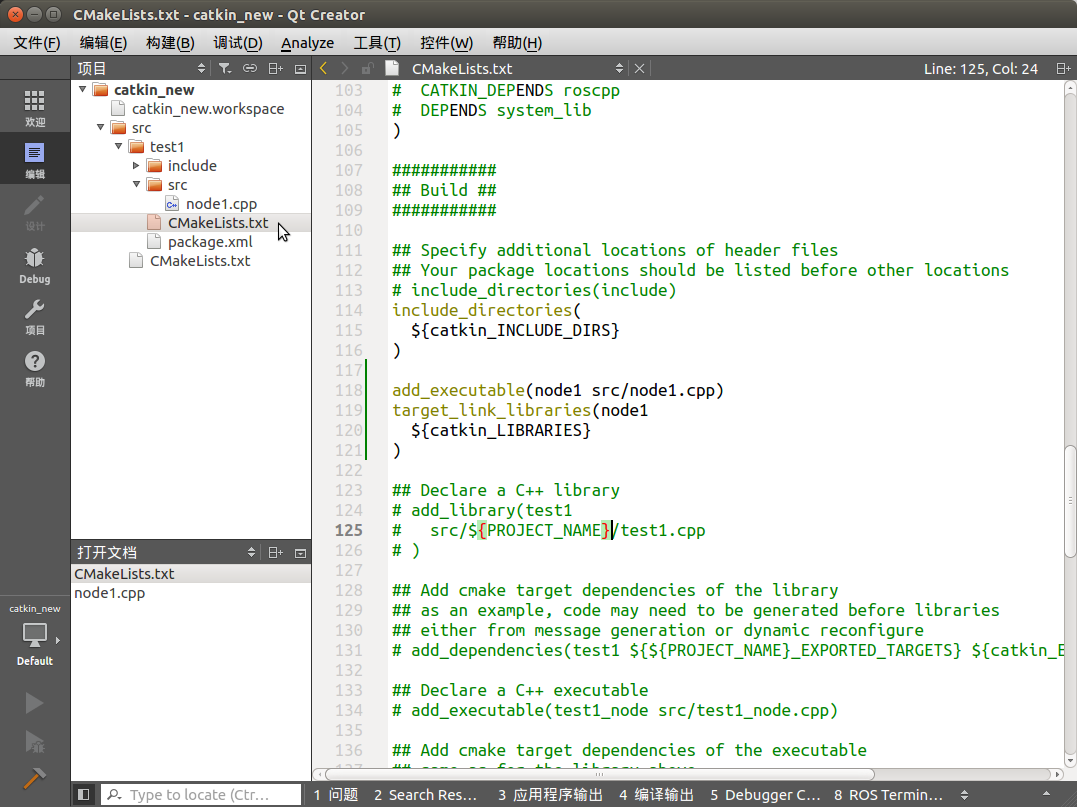
编译节点,为test1的CMakeLists.txt加上下面几行,意思是把node1.cpp编译成名为node1的节点
-
再后面include_directories,添加
add_executable(node1 src/node1.cpp)
target_link_libraries(node1
${catkin_LIBRARIES}
)
-
如图:
-
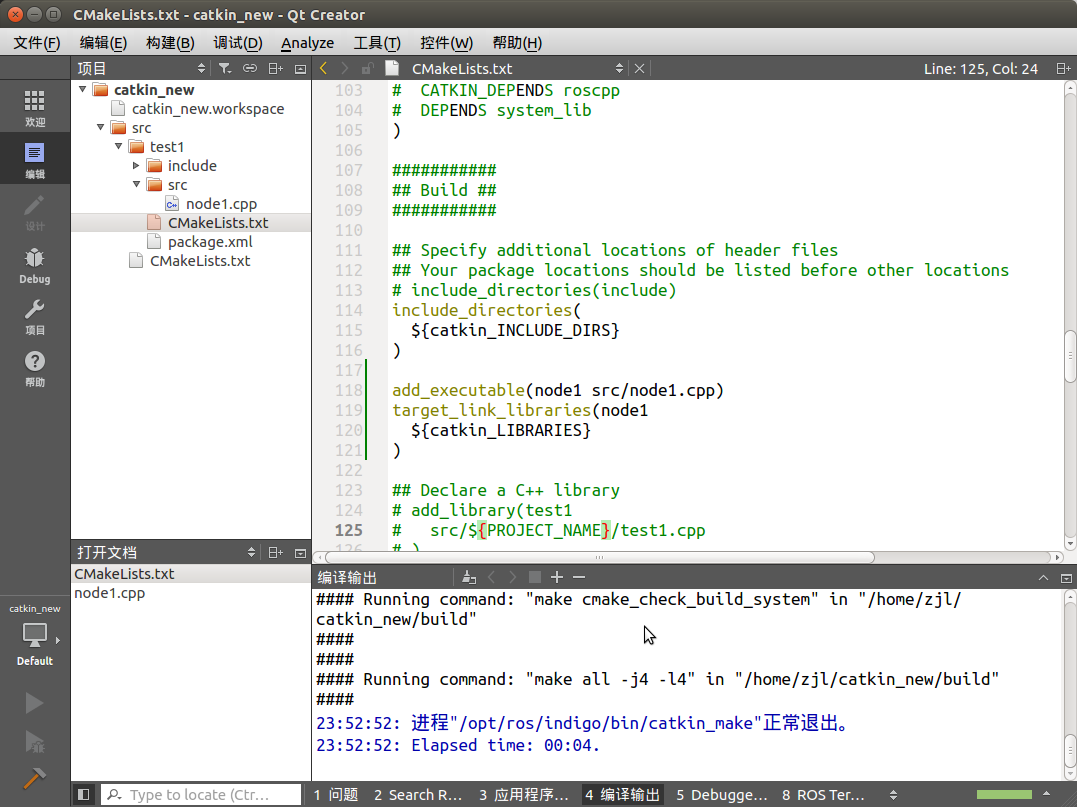
修改完CMakeLists.txt之后点击Qt左下角的锤子图标“构建项目catkin_new”
-
点击底边栏的“4 编译输出”可以看到编译结果,如下图
(4)运行节点
- 新终端,运行roscore
$roscore
-
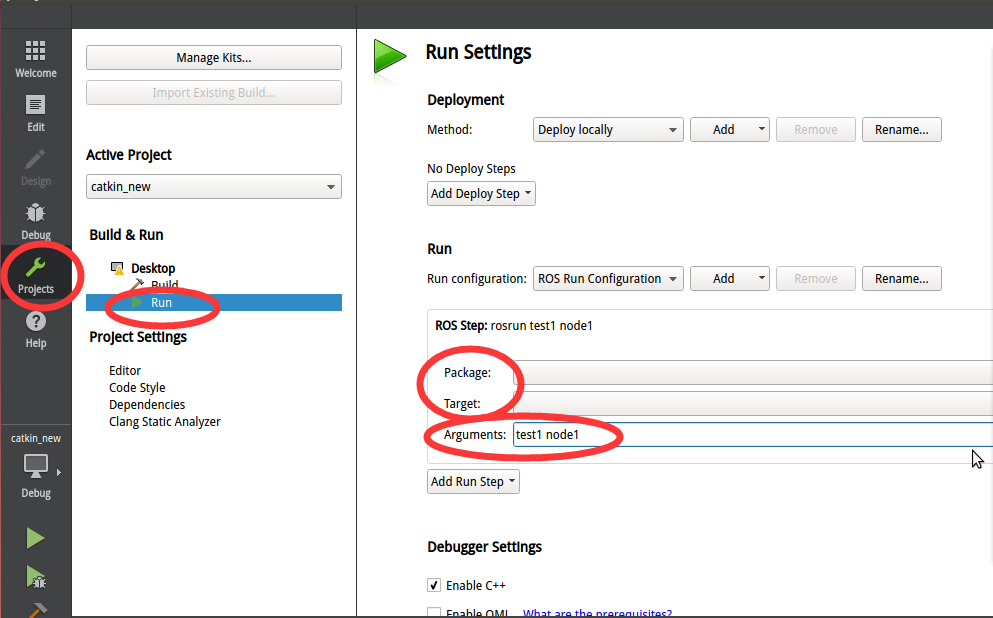
点击左侧兰的“项目”,在“Build&Run”页
-
测试时候无法选择Packge和Target,不过可以手工填写Arguments。也可以直接写入执行的命令和参数。
-
点击左下角的“三角”运行