这篇博客总结第二种在qt_ros中导入ROS工程的方式:新建workspace文件的方式。
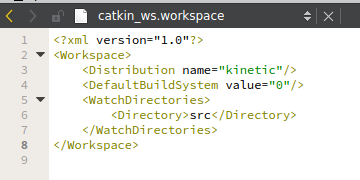
看了网上的很多博客,说是从Import ROS Workspace来导入工程,但是我安装的qt_ros插件并没有这个选项,因此该方法使用不了。此外一般ROS工程没有XXX.workspace文件,无法以工程形式导入。从上面一篇博客ROS与QT学习(三):qt_ros导入工程(1)可以看到workspace文件就是Qt导入ROS工作空间的关键所在,因此只需要在任一一个工程中添加XXX.workspace文件即可,XXX即为工程名,workspace文件的内容截图如下:
因此就有了现在的第2中导入工程的方式。
(1)打开qt_ros:
$ qtcreator-ros(2) 找一个不是用qt_ros建立的ROS工程,比如catkin_ws;
(3)在catkin_ws文件夹下新建一个catkin_ws.workspace文件(workspace文件名要和工程名相同),并添加前面给出的代码:
<?xml version="1.0"?>
<Workspace>
<Distribution name="kinetic"/>
<DefaultBuildSystem value="0"/>
<WatchDirectories>
<Directory>src</Directory>
</WatchDirectories>
</Workspace>(4) 在qt_ros的Welcome界面中,点击Open Project选项,选择刚才新建的workspace文件,如下图:

点击Open即可在qt中打开该工程。
接下来就可以在qt_ros下对原来的ROS工程进行开发和使用了。
这种方式通过打开workspace文件来导入工程,因此前提是需要存在workspace文件。关闭qt_ros工程后,会发现在catkin_ws文件夹内生成了另外一个文件catkin_ws.workspace.user。